00:00:00
便捷功能
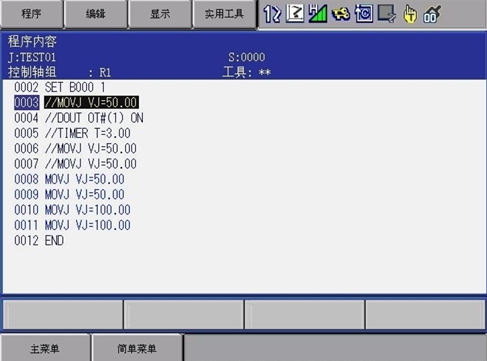
编辑程序
程序有 4 种编辑方式
🚩 复制
🚩 剪切
🚩 粘贴
🚩 反转粘贴

复制/剪切
在程序内容画面上移动
光标到命令处
在开始行按下【 转换 】+【 选择 】

移动
光标到结束行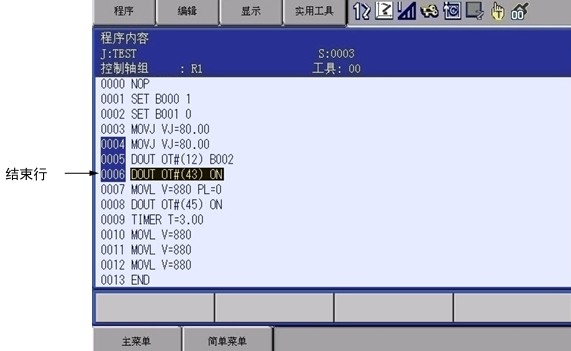
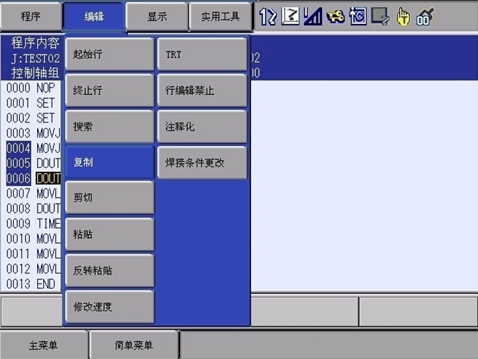
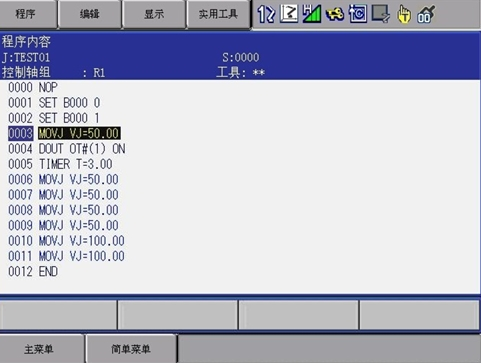
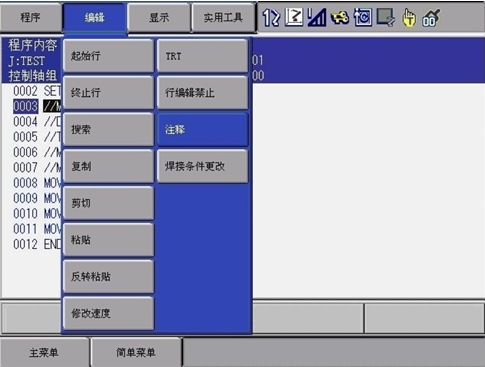
选择菜单中的【 编辑 】
🔰 选择【 复制 】
🔰 选择【 剪切 】
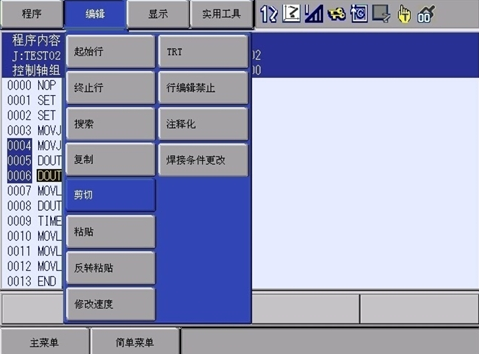
🔰 剪切会显示确认对话框

粘贴
在程序内容画面上移动
光标到要粘贴的前一行选择菜单中的【 编辑 】
选择【 粘贴 】


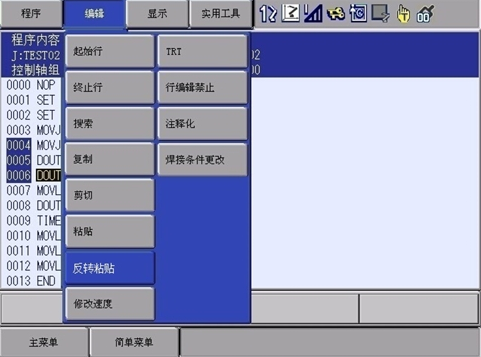
反转粘贴
在程序内容画面上移动
光标到要反转粘贴处的前一行选择菜单的【 编辑 】
选择【 反转粘贴 】
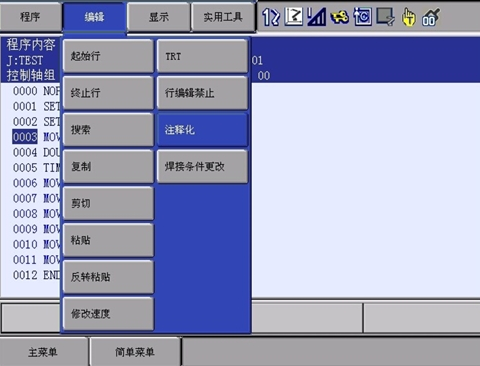
行注释化
在程序内容画面上移动
光标到要注释的行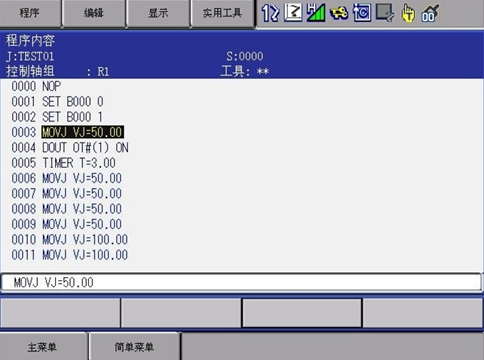
按下【 转换 】+【 选择 】
🔰 单行注释
🔰 多行注释
按下【 ↑ 】或【 ↓ 】,选中多个要注释化的行
选择菜单中的【 编辑 】 ➡ 【 注释化 】
选择的行前面显示 “
//”,即为改行已被注释
解除注释
在程序内容画面上移动
光标到要解除注释的行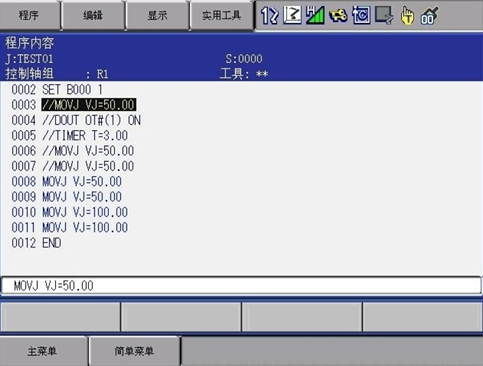
按下【 转换 】+【 选择 】
选择菜单中的【 编辑 】 ➡ 【 * 注释化 】
行前面的 “
//”不再显示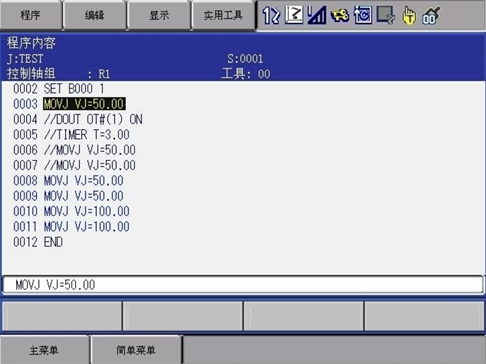
安全模式

操作模式:允许操作人员进行基本操作如:机器人的启动及停止和生产线异常时的恢复作业
编辑模式:允许示教人员编辑程序内容管理模式:允许操作人员进行系统升级和维护如:数据的设定、时间的设定、用户 ID 的更改、控制柜的管理
安全模式:允许操作人员进行系统的安全管理如:编辑安全功能相关的文件
一次性管理模式:允许操作人员进行比管理模式更高级的维护作业如:载入批量数据( CMOS.BIN)、参数性批量数据( ALL.PRM)、功能定义参数( FD.PRM)
安全模式的更改
选择主菜单 【 系统信息 】
显示子菜单
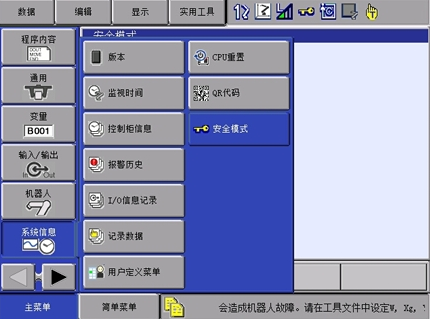
选择 【 安全模式 】
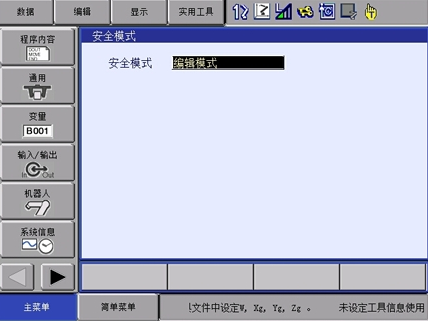
从列表中选择目标更改的安全模式

输入对应口令
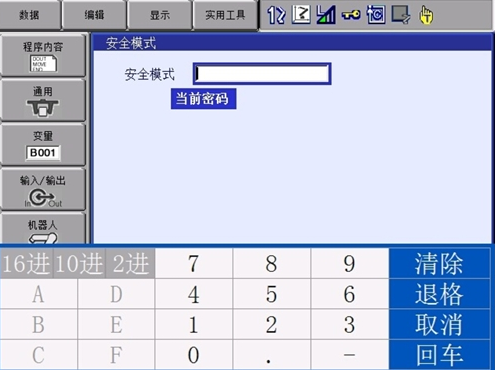
编辑模式:“ 16个0 ” 【0000000000000000】管理模式:“ 16个9 ” 【9999999999999999】安全模式:“ 16个5 ” 【5555555555555555】按下【 回车 】 口令正确 ✅ 时,对应模式就会更改
用户口令的更改
在“ 编辑/管理/安全 ”模式下才能更改用户口令
选择主菜单 【 设置 】
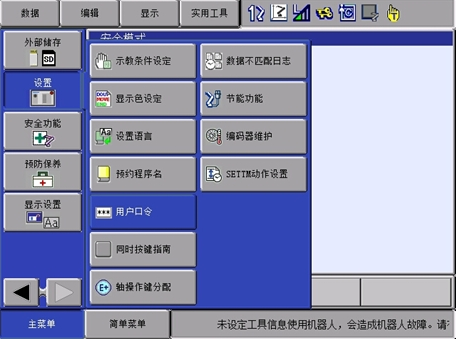
选择用户口令

选择目标更改的用户
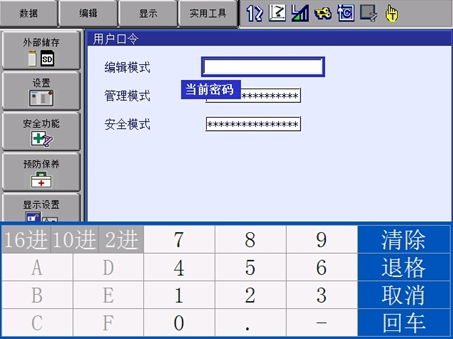
输入
当前用户口令,按下【 回车 】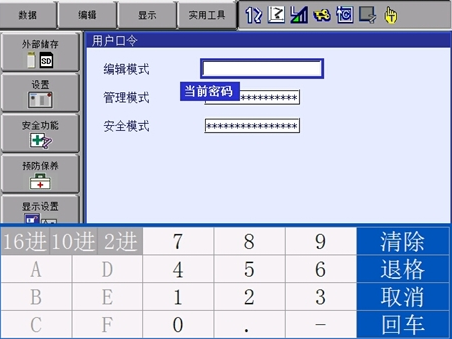
输入新口令,按下【 回车 】
用户口令被更改
禁止程序编辑
选择主菜单中的【 程序 】
选择【 程序内容 】
选择下拉菜单的【 显示 】
选择【 程序信息 】
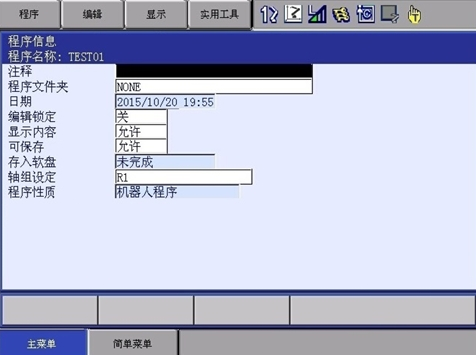
将
光标移至编辑锁定按下【 选择 】,使其编辑锁定状态设为
允许选择主菜单 【 设置 】
选择【 示教条件设定 】

将
光标移至禁止编辑的程序程序点修改按下【 选择 】,使其编辑状态设为
允许
禁止显示程序
选择主菜单中的【 程序 】
选择【 程序内容 】
选择下拉菜单的【 显示 】
选择【 程序信息 】
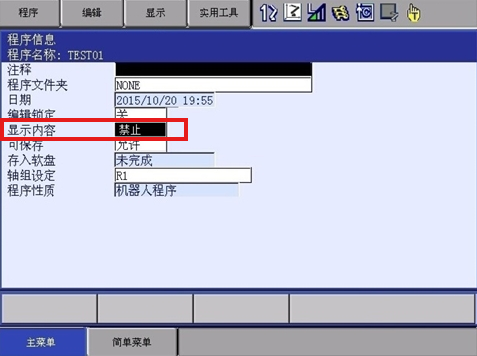
将
光标移至显示内容按下【 选择 】,使其编辑状态设为
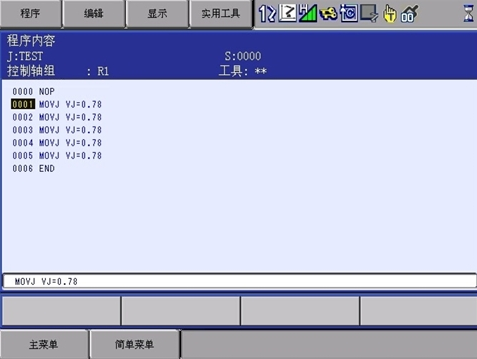
禁止选择下拉菜单的【 显示 】
选择【 程序内容 】
显示程序信息画面。除开始的 NOP 命令以及最后的 END 命令以外,全部显示为 “ Invisible ”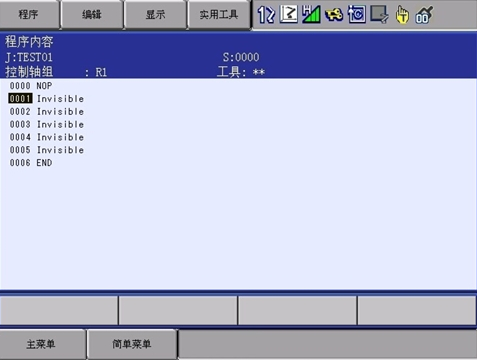
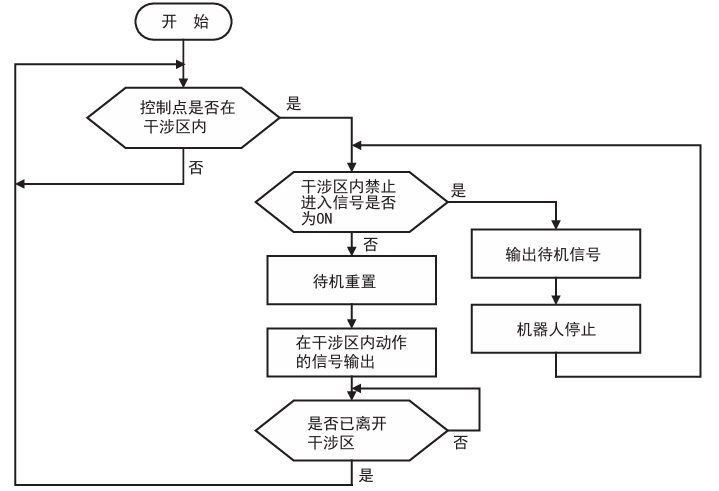
干涉区
干涉区 ☞ 防止多个机器人之间或机器人与周边设备之间发生干涉的功能 干涉区最多可设 64 个
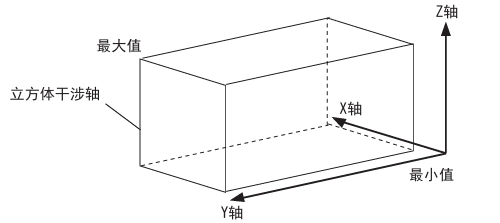
🚩 立方体干涉区
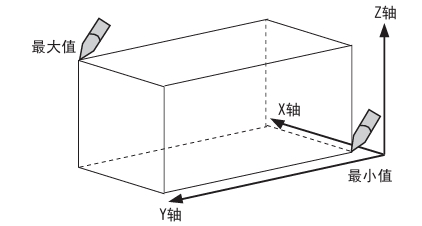
🚩 立方体外干涉区
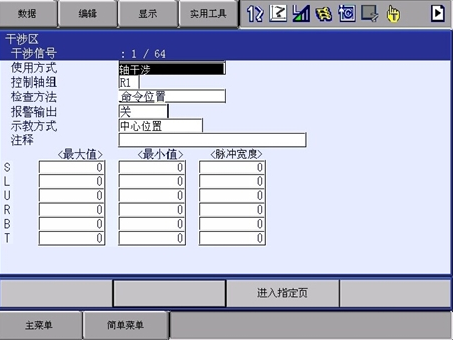
🚩 轴干涉区
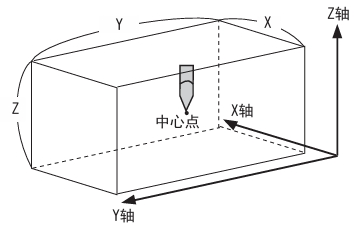
立方体干涉区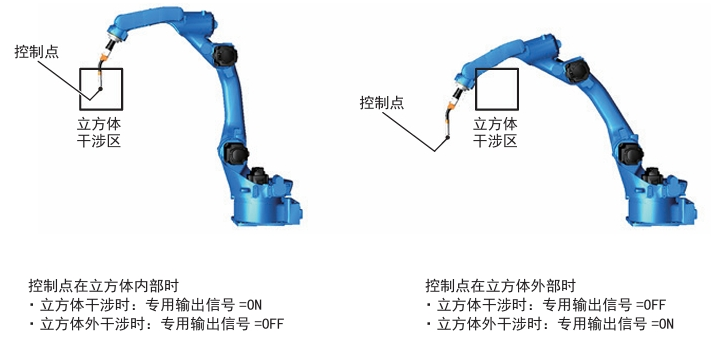
设定方法:
🔆 输入立方体坐标的最大值和最小值
🔆 通过轴操作将机器人移动到立方体坐标的最大值和最小值位置
🔆 输入立方体三条边的长度后,通过轴操作将机器人移动到中心点
设定操作
选择主菜单 【 机器人 】
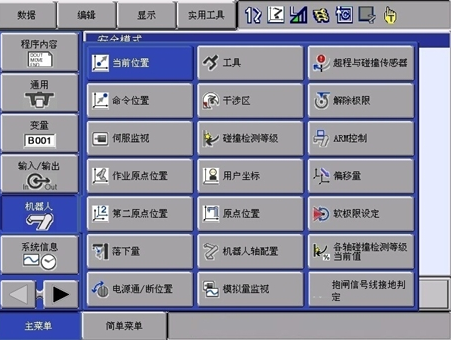
选择【 干涉区 】
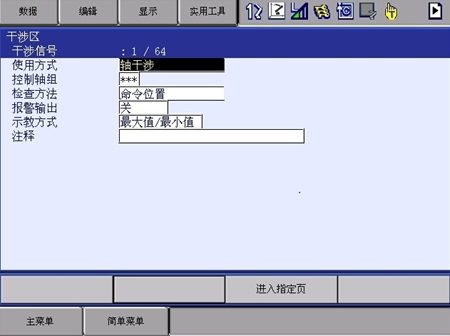
设定目标干涉信号序号

选择“
使用方法” ➡ 【 立方体干涉 】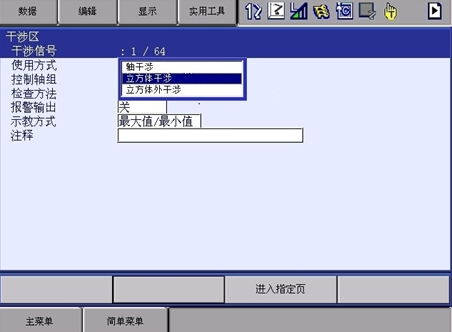
选择控制的机器人
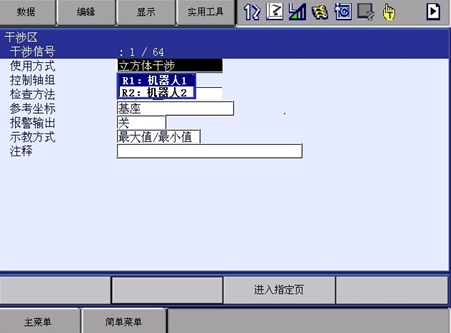
选择目标坐标系
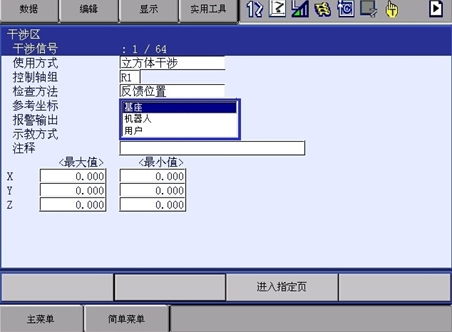
选择“
检查方法”
每次按下【 选择 】,会在 “命令” 和 “反馈” 交替切换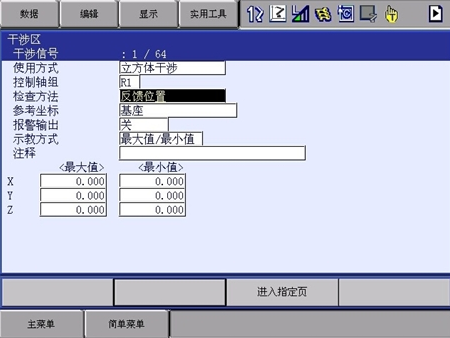
命令:当前值画面设定的位置进入干涉区域时,接通信号反馈:机器人实际位置进入干涉区时,接通信号
NOTE
向外部输出机器人位置而使用干涉信号,设定为“ 反馈 ”,机器人进入干涉区,减速停止
选择“
报警输出”
按下【 选择 】切换
输入立方体坐标的最大/最小值
💠 输入要设定的“最大值”和“最小值” 并按下【 回车 】通过轴操作将机器人移动到立方体坐标的最大值和最小值位置
💠 按下修改
💠光标移动到“最大值”
💠 通过【 轴操作键 】移动机器人到立方体最大值位置
💠 按下【 回车 】
💠 立方体干涉区设定为当前值
💠
光标移动到“最小值”
💠 通过【 轴操作键 】移动机器人到立方体最小值位置
💠 按下【 回车 】输入立方体三条边的长度后,通过轴操作将机器人移动到中心点
💠 选择“示教模式” ➡ “中心位置”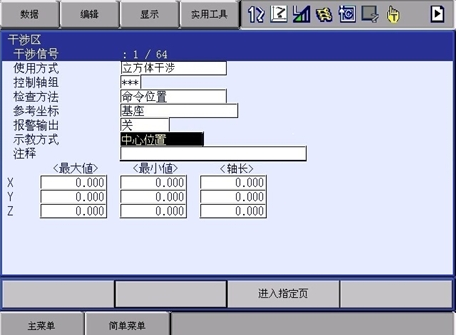
💠 设定“
轴长”并按下【 回车 】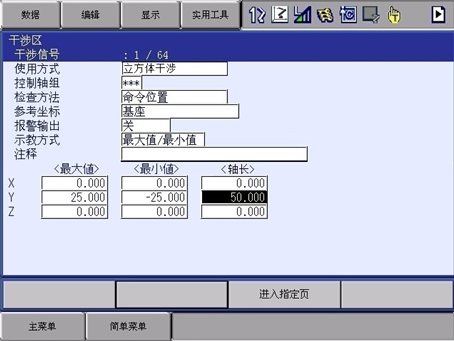
💠 按下【 修改 】
💠 通过【 轴操作键 】移动机器人到立方体中心点位置
💠 按下【 回车 】
干涉区数据清空
选择主菜单中的【 机器人 】
选择【 干涉区 】
选择要*
清除的干涉信号*选择下拉菜单中的【 数据 】
选择【 清除数据 】

选择“ 是 ”

将清除所选干涉区的所有数据

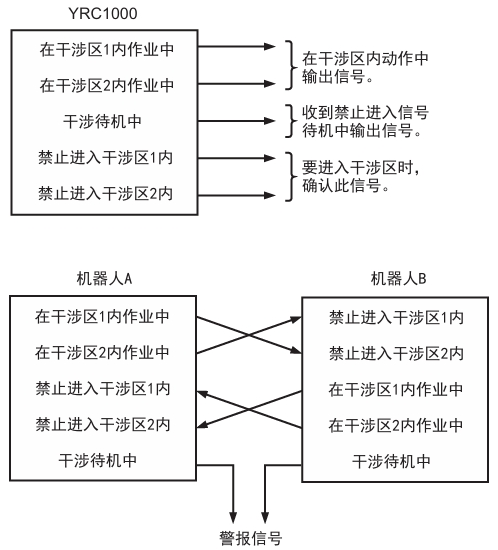
🔱 YRC1000 的输入输出信号和机器人的动作关系
🔱 两台机器人在同一区域内作业
碰撞检测
碰撞检测功能是指当工具或机器人和周边设备发生碰撞时,机器人紧急停止动作,减少因碰撞引起的损失的功能
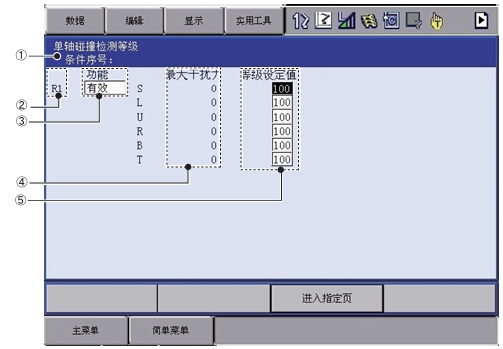
① 条件序号(1~9)
1~7:再现模式切换检测等级用
8 :再现模式基准检测等级用
9 :示教模式检测等级用
② 选择被检测的机器人
③ 设定碰撞功能是否有效
④ 作用在机器人上的最大外力
最大外力可通过菜单的【 数据 】→ 【 清空最大值 】来清除
⑤ 设定大于最大外力值得数值
超过此值时,会检测到碰撞
SHCKSET 命令

① 指定机器人
② 碰撞检测等级条件(1~7)
③ 各轴碰撞检测等级值
AXIS1 是 S 轴、AXIS2 是 L 轴、AXIS3 是 U 轴、AXIS4 是 R 轴、AXIS5 是 B 轴、AXIS6 是 T 轴
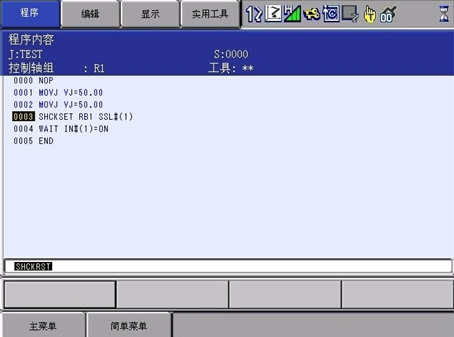
命令插入
选择主菜单的【 程序 】
选择【 程序内容 】
将
光标移到地址栏
移动
光标到插入 SHCKSET 命令的前一行按下【 命令一览 】

选择 SHCKSET 命令
缓冲区显示出 SHCKSET 命令
移动
光标到碰撞检测条件序号上,按下【 选择 】
可使用【 数字键 】更改编号
输入数值后按下【 回车 】,数值更改完成
追加指定机器人/工装轴:
移动
光标到输入缓冲行中的命令上,按下【 选择 】
显示详细编辑画面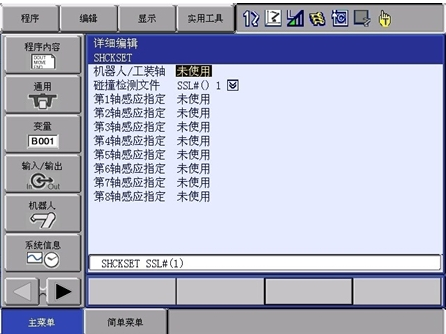
移动
光标到要追加的机器人上,按下【 选择 】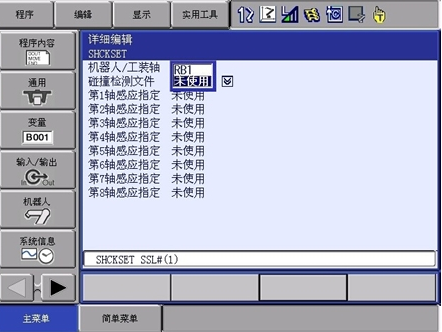
追加完成后,按下【 回车 】
追加各轴碰撞检测:
移动
光标到输入缓冲行中的命令上,按下【 选择 】
显示详细编辑画面移动
光标到要更改检测等级的轴上,选中“未使用”,按下【 回车 】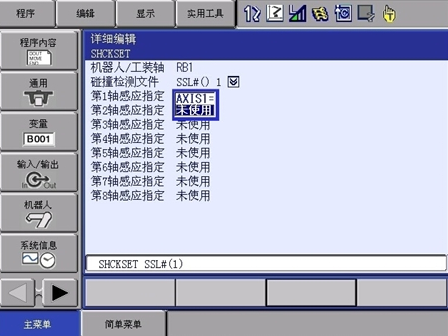
选择对话框里的“ AXIS O = ”
追加完成后,按下【 回车 】
移动
光标到各轴碰撞检测等级数值上,按下【 选择 】
可使用【 数字键 】更改

输入数值后按下【 回车 】,数值更改完成
按下【 插入 】和【 回车 】
碰撞检测的复位
当碰撞检测功能检测出工具或机器人与周边设备发生碰撞时,机器人发出报警并紧急停止动作
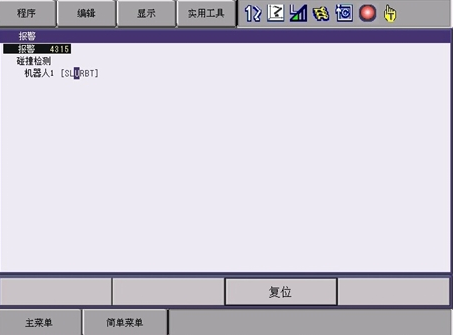
选择报警画面中的“ 复位 ”,报警复位,解除碰撞检测状态
直接打开
直接打开功能,可立即显示 CALL 命令调用的程序、条件文件的内容
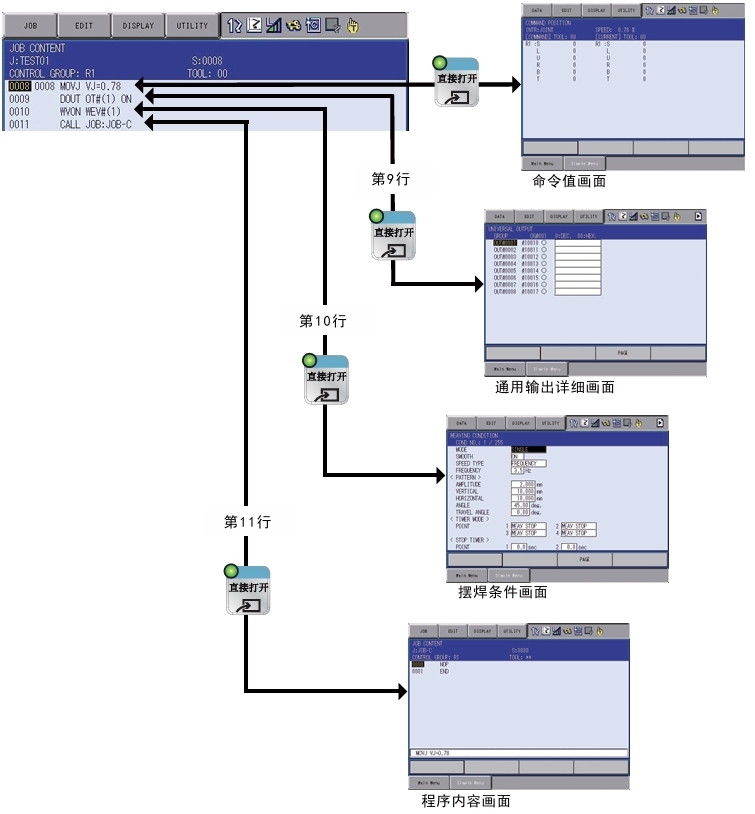
直接打开程序内容画面
- 在程序内容画面中将光标移动到程序名称或条件文件处
- 按下【 直接打开 】
多窗口功能
多窗口设定
| 多窗口 | 多窗口 |
|---|---|
 |  |
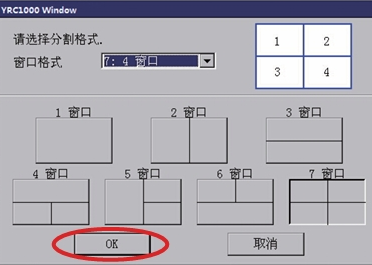
选择主菜单中的【 显示设置 】 ➡ 【 改变窗口格式 】

画面中央显示窗口分割设定画面

移动光标到
窗口格式处,按下【 选择 】
点击 OK
活动画面切换

✌ 按下【 多画面 】
点击目标活动画面
✌ 按下【 转换 】+【 多画面 】
切换到单画面