00:00:00
MOTOMAN 介绍
💡 什么是“ MOTOMAN ”
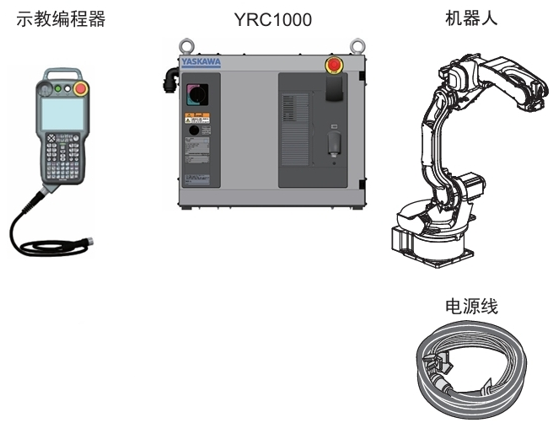
“ MOTOMAN ”是安川电机工业机器人的商品名,是由本体“机器人”、机器人控制柜“YRC1000”、“YRC1000示教编程器”和“电源线”构成
关于机器人本体
例如:MOTOMAN-GP8 ( 型号: YR-1-06VX8-A00 型)
型号 标注在机器人本体背面铭牌的 “ TYPE ”处

注意事项
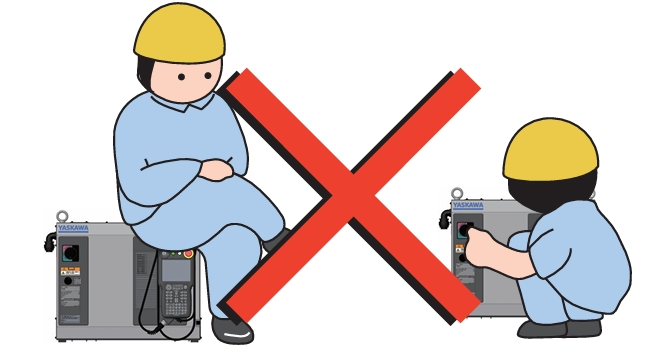
⚠️ 请不要强行扳动 、悬吊 、骑坐机器人 
⚠️ 请不要坐在 YRC1000 上
⚠️ 请不要随意触碰 YRC1000 或其他的控制柜开关、按钮
线路连接
电线的连接
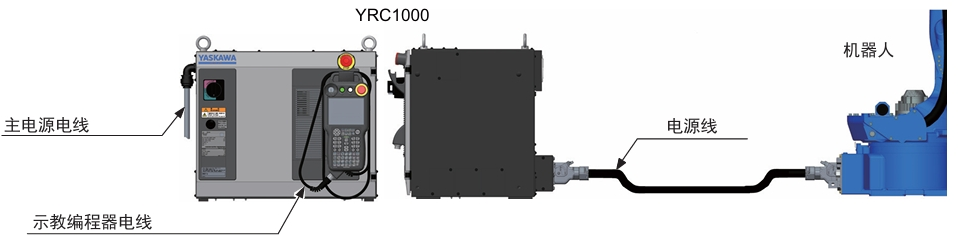
连接电源线 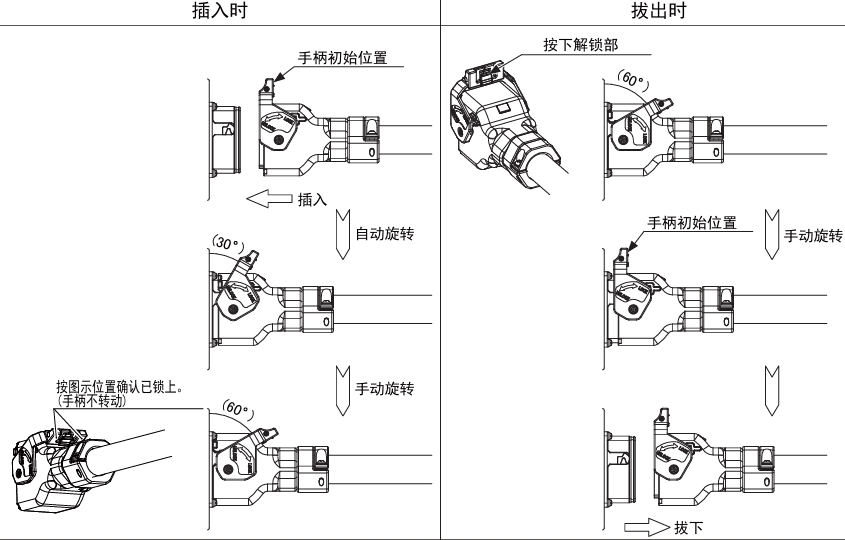
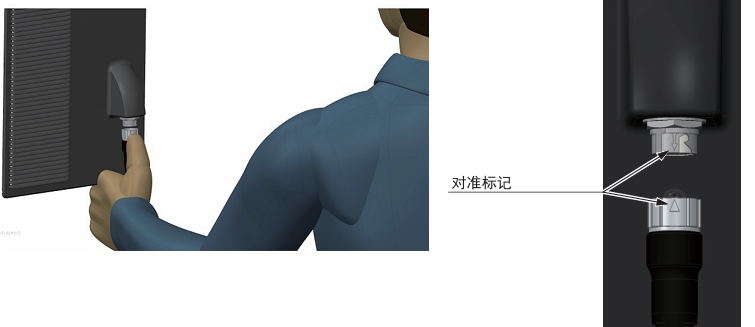
连接示教编程器
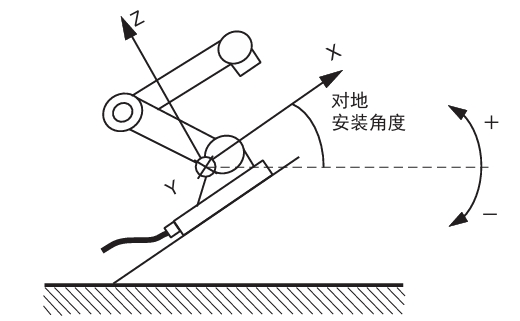
机器人对地安装角度 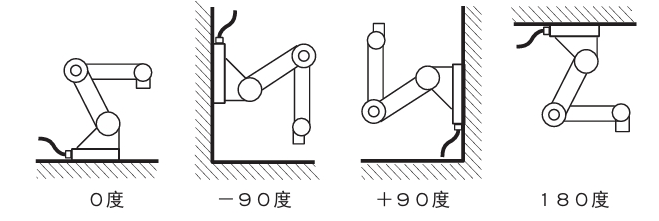
对地安装角度是指机器人绕坐标 Y 轴旋转,机器人坐标的 X 轴与水平面的夹角
注意
- 对地安装角度设定不正确,将无法准确控制机器人
- 必须设定准确的数值
- 特别注意正负符号
- 对地安装角度只能以绕机器人坐标 Y 轴转动角度来设定
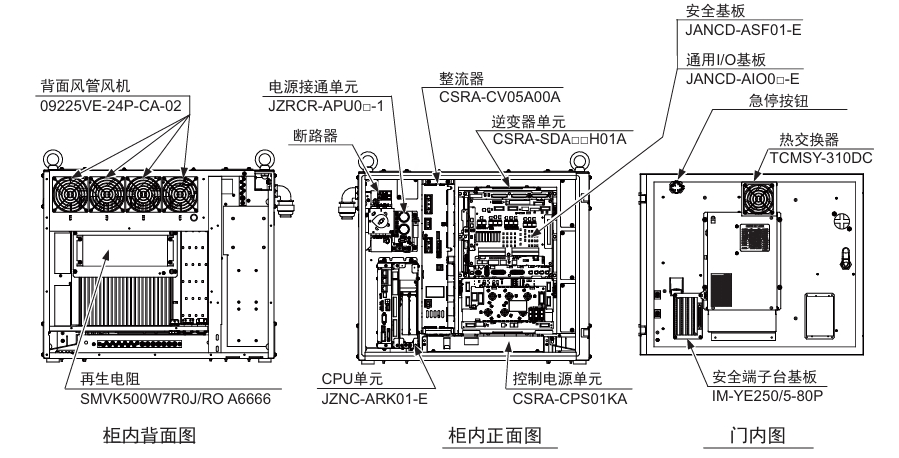
控制柜
200V ~ 240V 规格
- 小容量机型
- 中、大容量机型
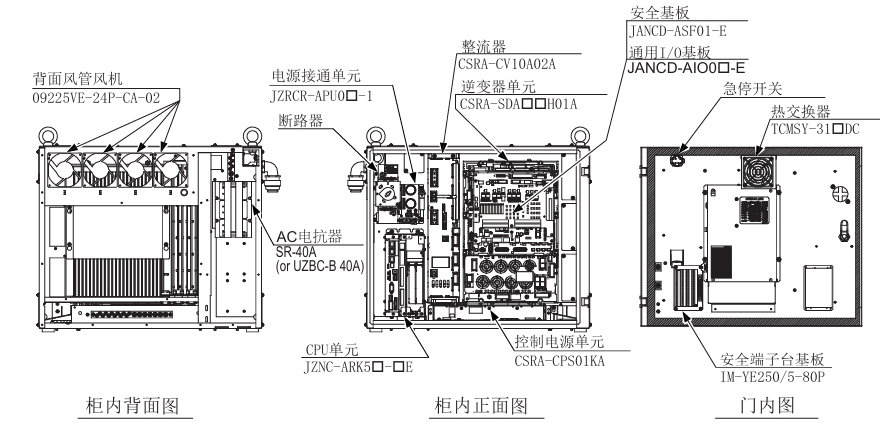
380V ~ 480V 规格
- 小容量机型

- 中、大容量机型
冷却系统

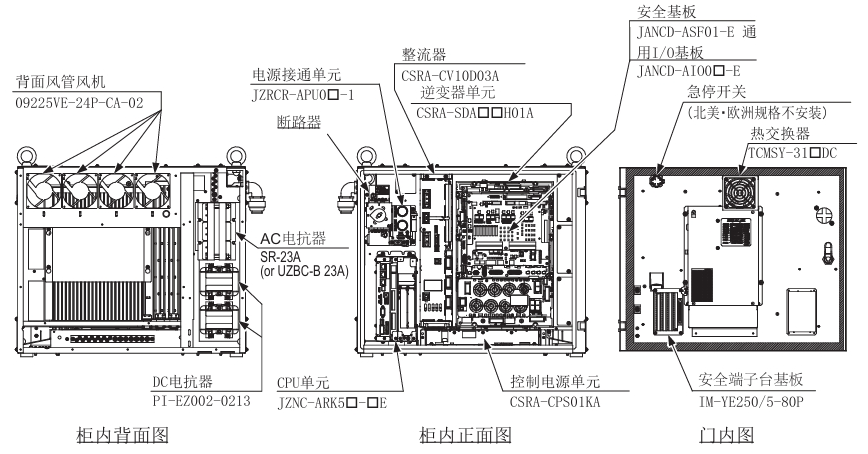
内部组成单元
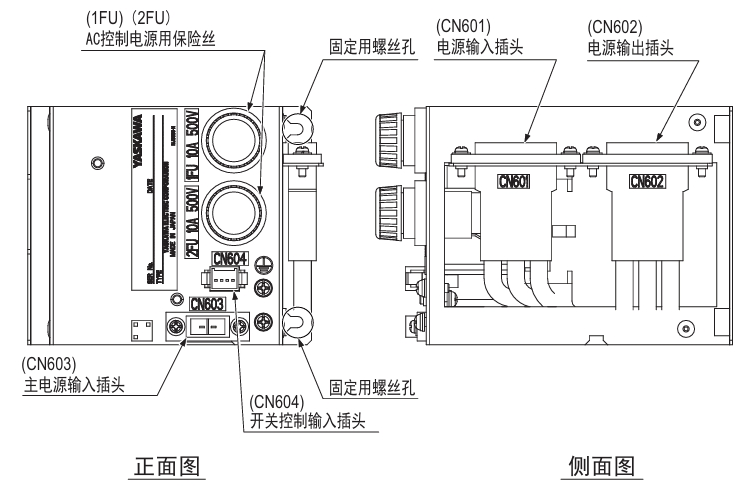
电源接通单元
JZRCR-APUO □ -1:
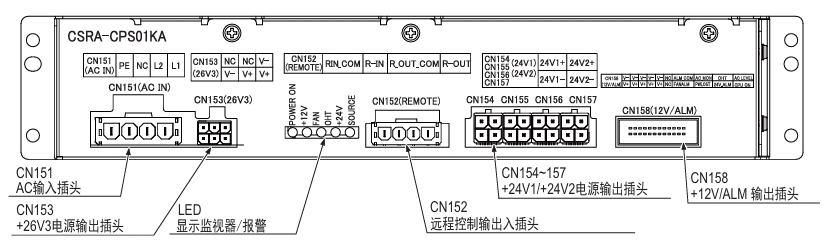
控制电源单元
CSRA-CPS01KA:
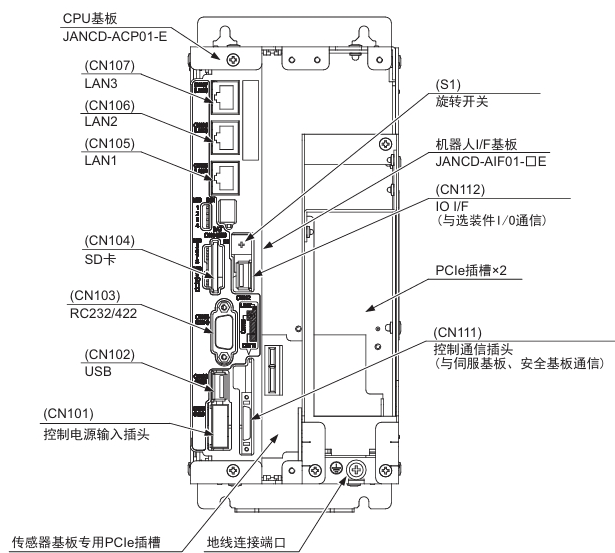
CPU单元
JZNC-ARK01-E:
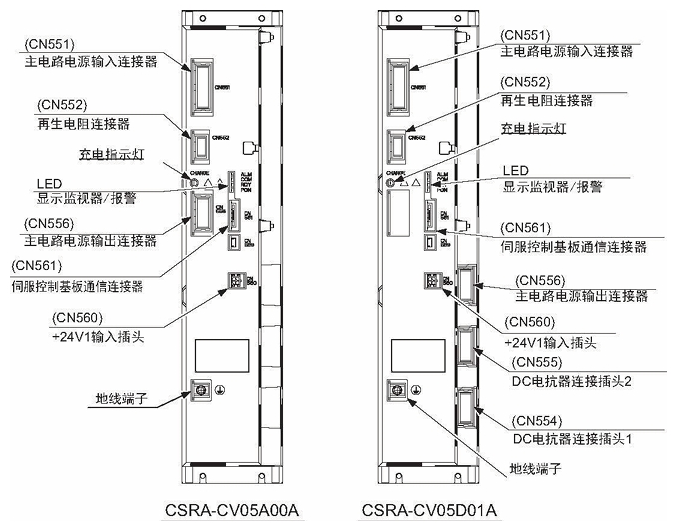
整流器
将提供的 3 相电源转成 DC 电源,提供给逆变器
| 输入电压 | 型号 |
|---|---|
| 三相 AC200~240V | CSRA-CV05A00A |
| 三相 AC380~480V | CSRA-CV05D01A |
逆变器单元
CSRA-SDA □□ H01A:

逆变器
将整流器供给的 DC 电源转换成 3 相电机马达电流,并向各电机马达输出

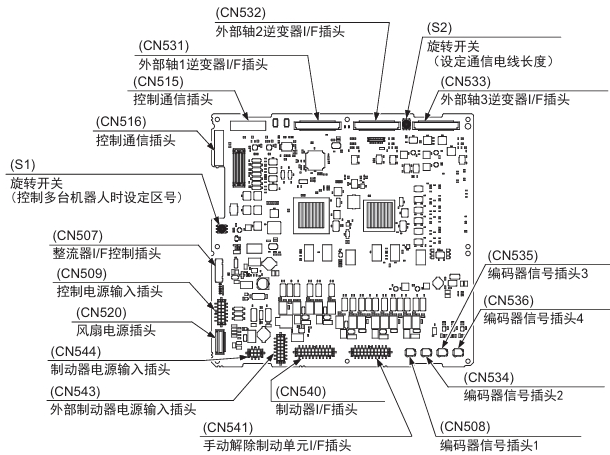
伺服控制基板
控制机器人 6 轴伺服电机马达
CSRA-SDCA01AA:
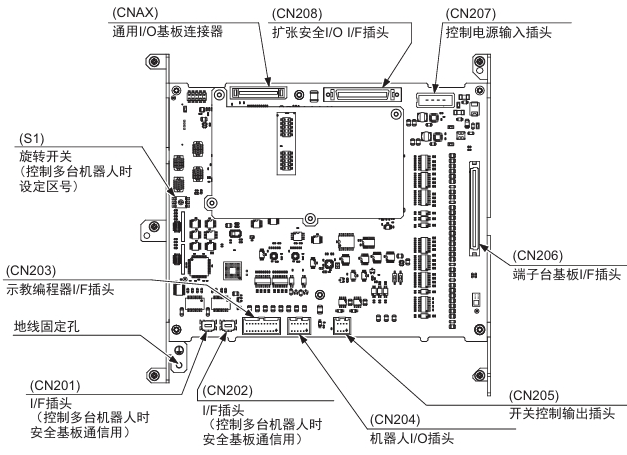
安全基板
- 专用安全输入回路(双通道)
- 通用安全输入回路(双通道)
- 通用安全输出回路(双通道)
- 紧急停止输出回路(双通道)
- 伺服电源控制信号输出回路(双通道)
- 机器人系统用非安全输出入回路
- 安全端子台基板 I/F
JANCD-ASF01-E:
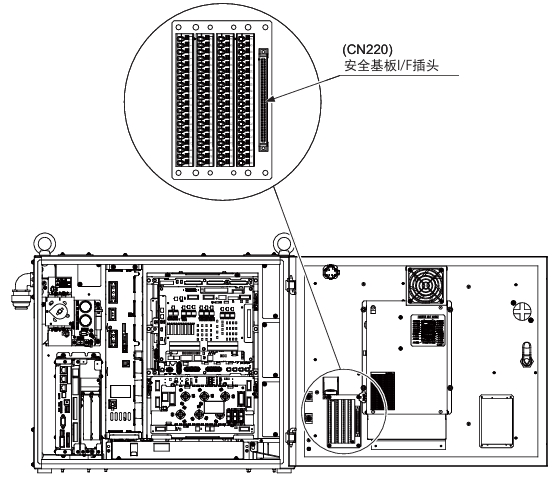
安全端子台基板
是为了连接安全输出输入信号等专用外部信号的端子台基板
IM-YE250/5-80P:
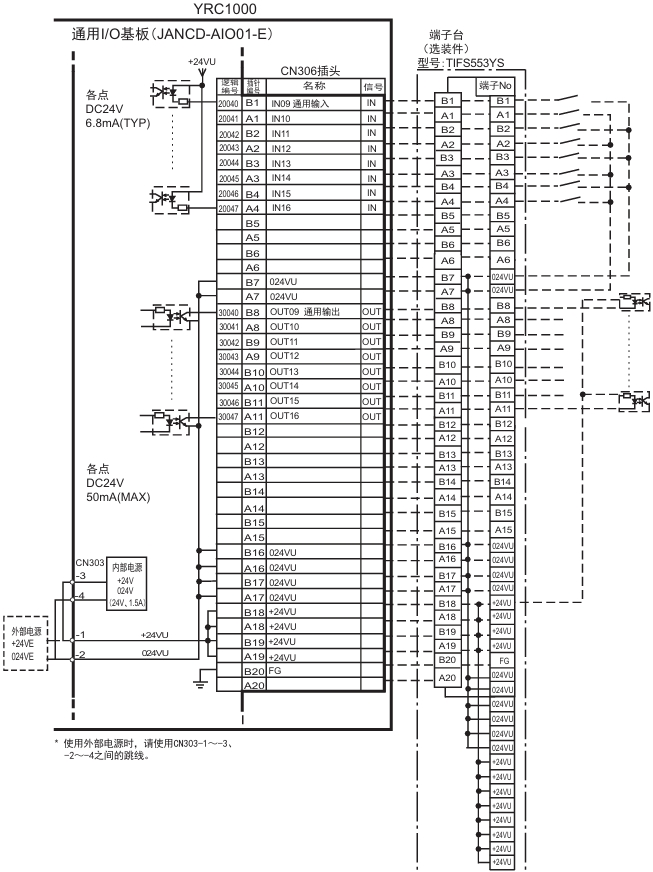
通用 I/O 基板
| 输入/输出规格 | 型号 |
|---|---|
| NPN | JANCD-AI001-E |
| PNP | JANCD-AI002-E |
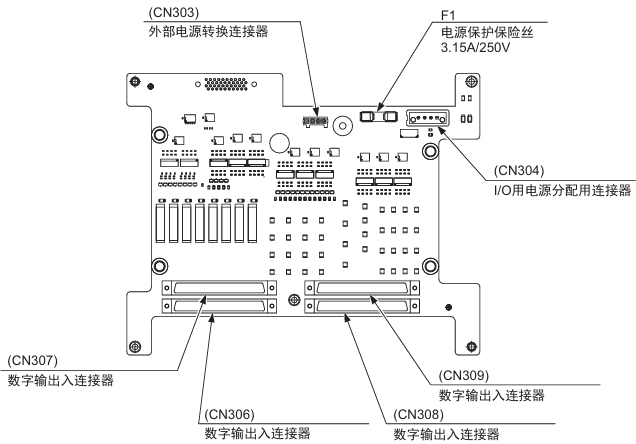

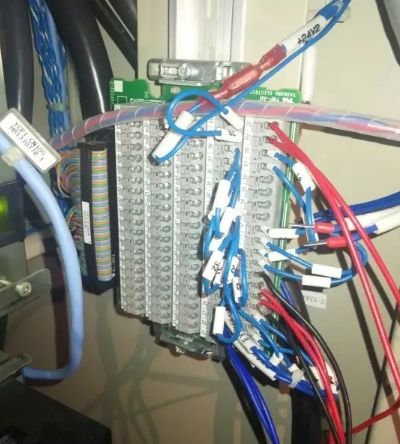
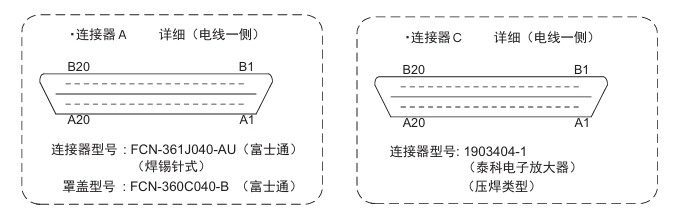
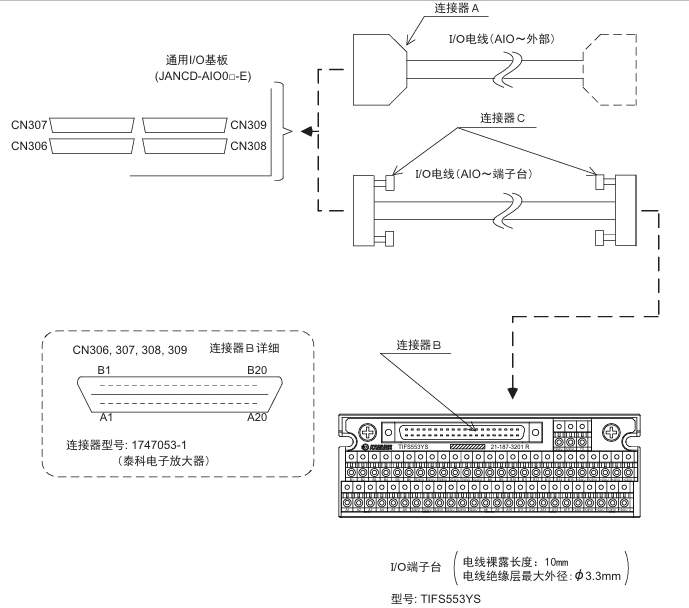
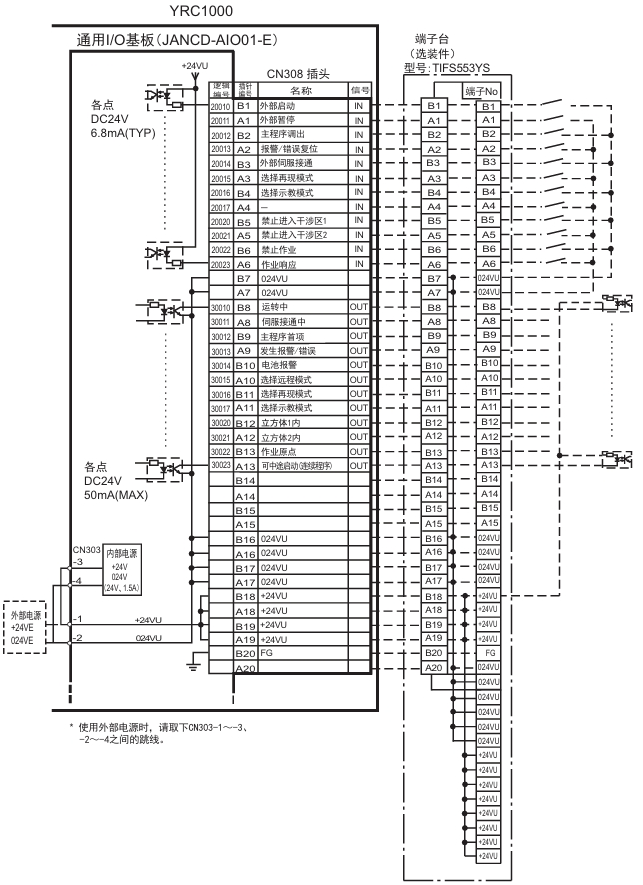
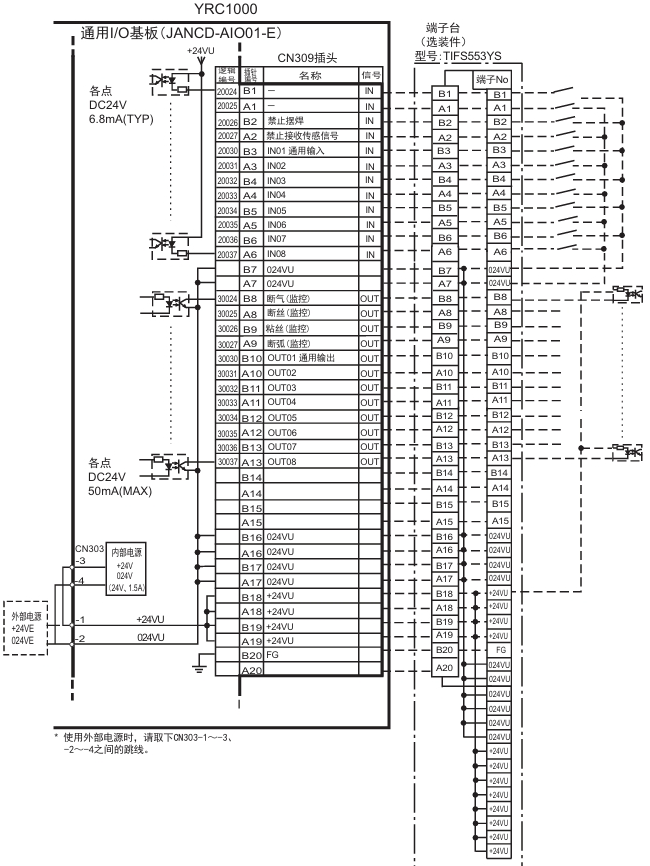
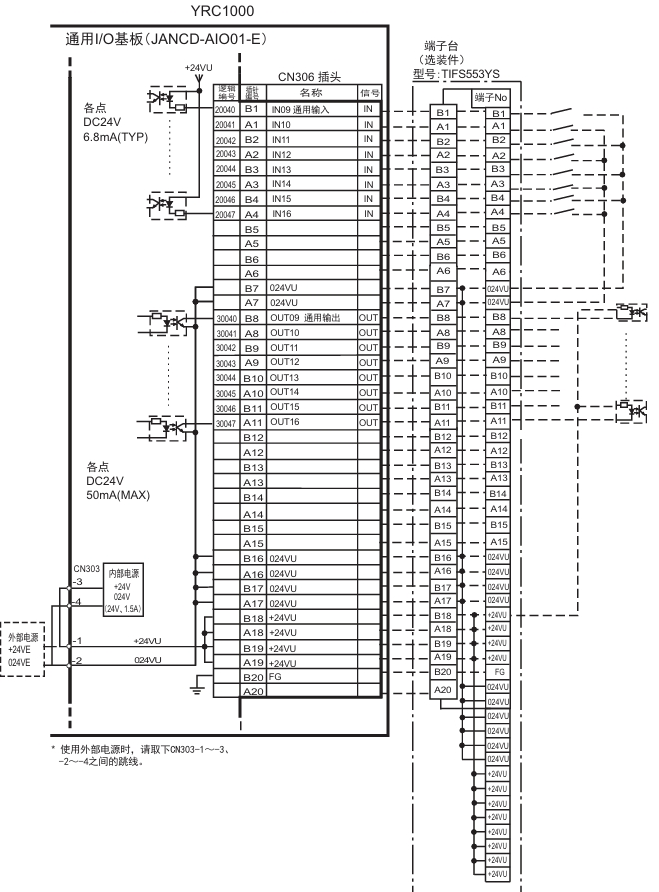
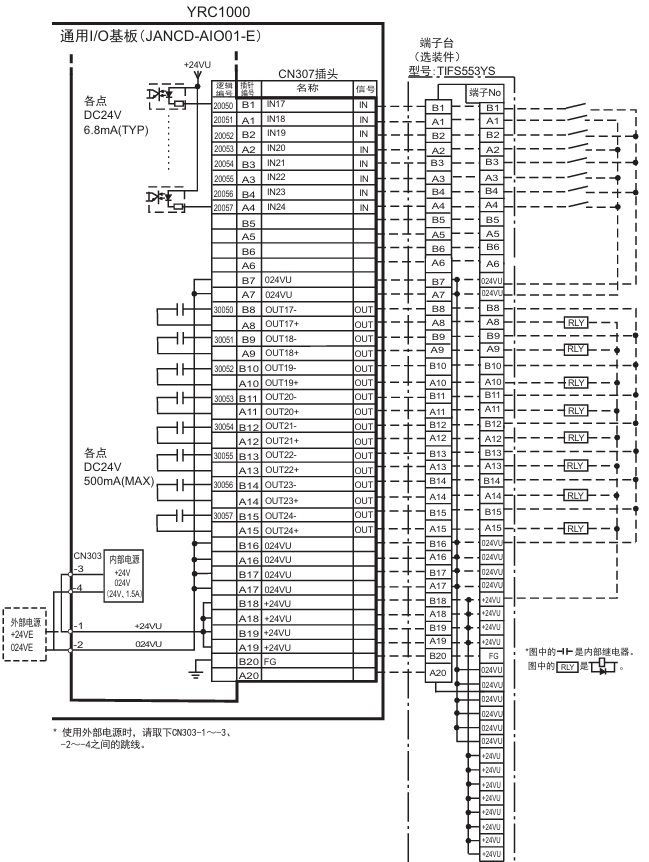
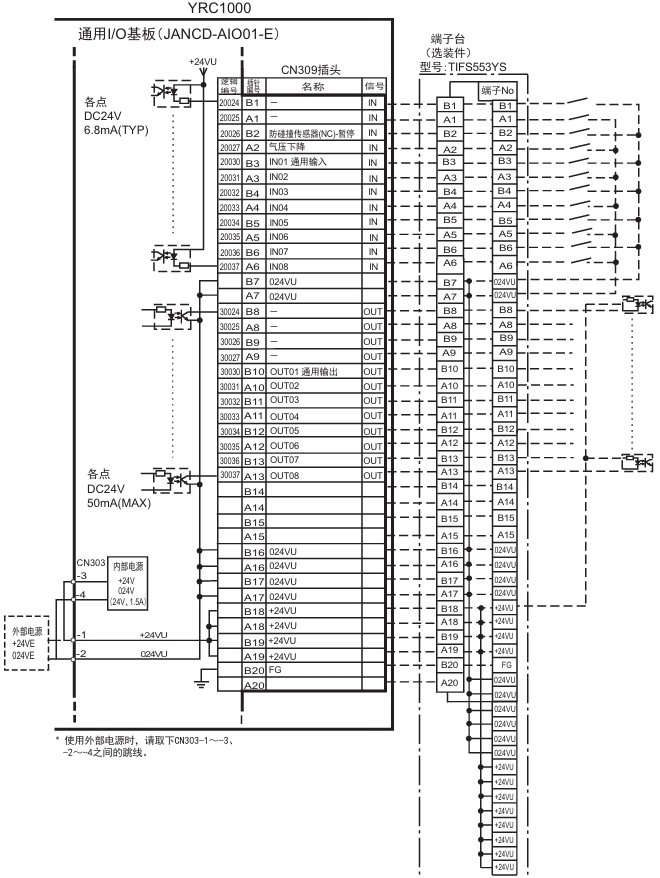
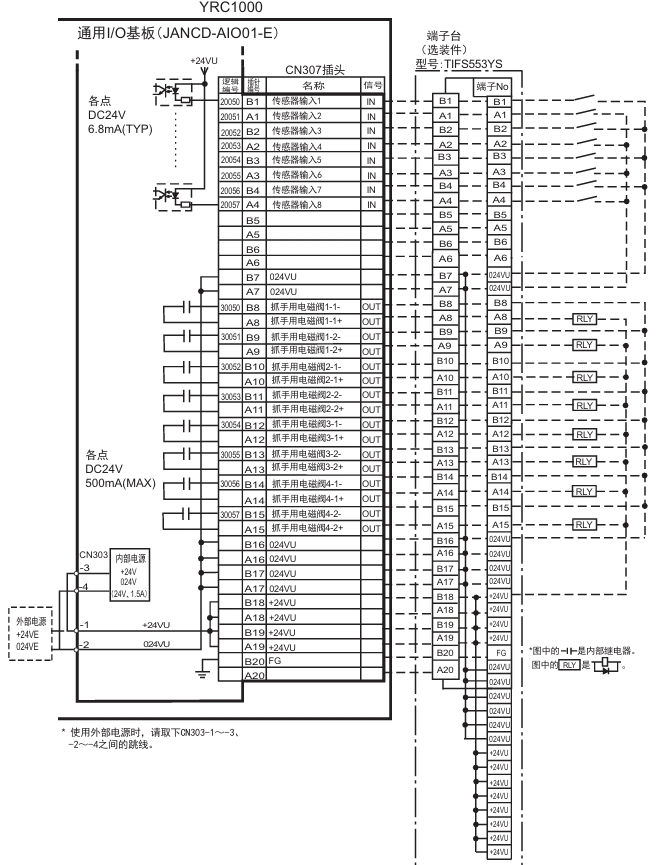
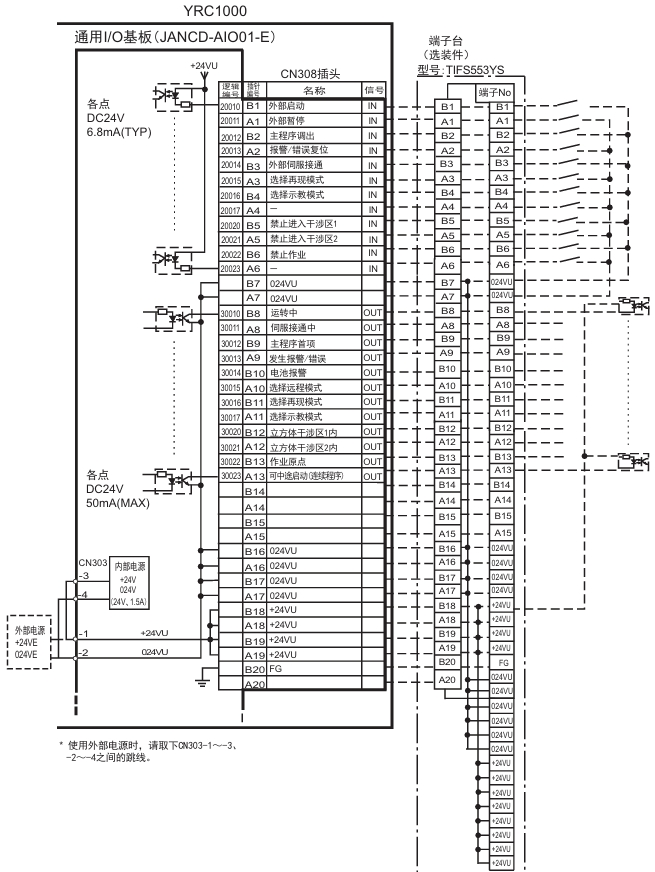
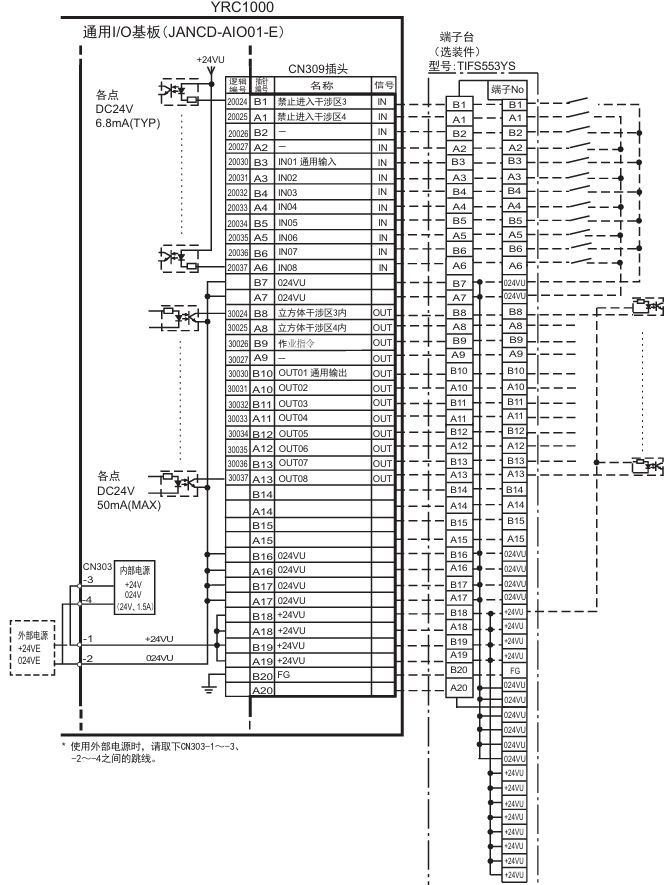
机器人通用输出入连接器(CN306、307、308、309)的连接


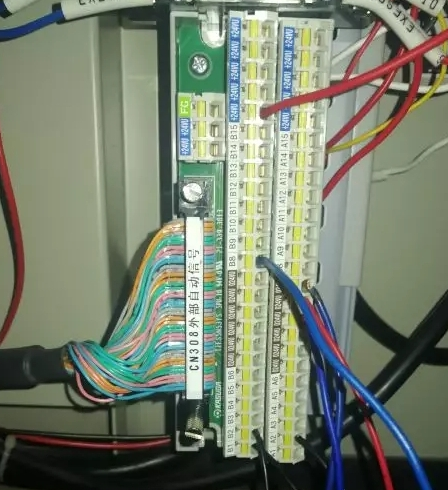
接线
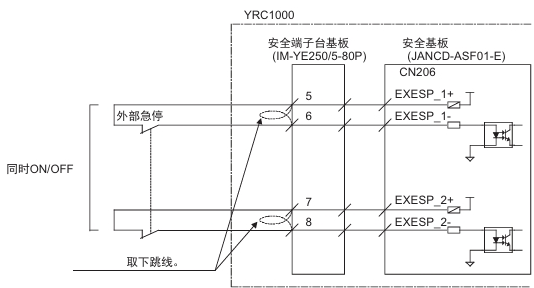
外部急停接线
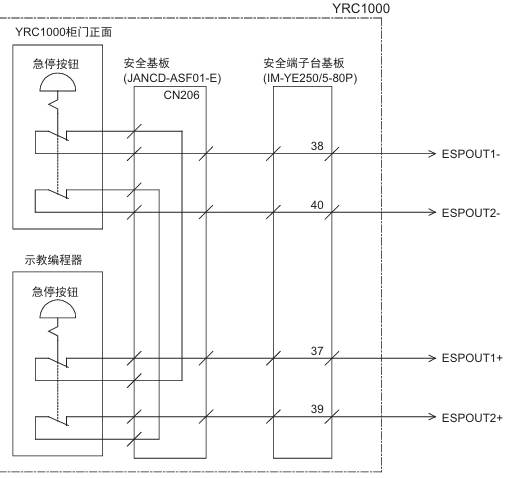
急停输出:
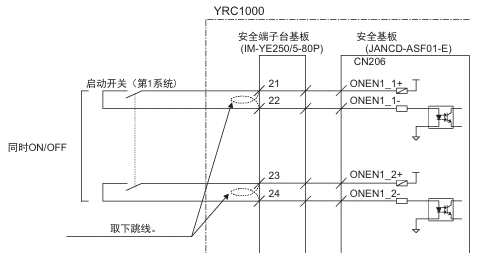
外部启动开关接线
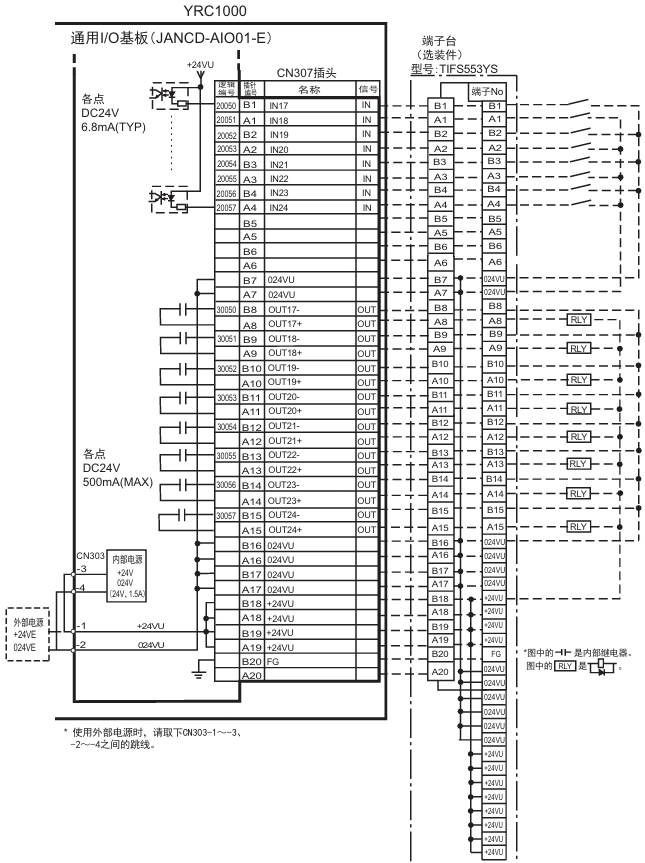
JANCD-AI001-E 通用 I/O 基板
弧焊用(CN308)
弧焊用(CN309)
弧焊用(CN306)
弧焊用(CN307)
搬运用(CN308)

搬运用(CN309)
搬运用(CN306)

搬运用(CN307)
通用(CN308)
通用(CN309)
通用(CN306)
通用(CN307)