00:00:00
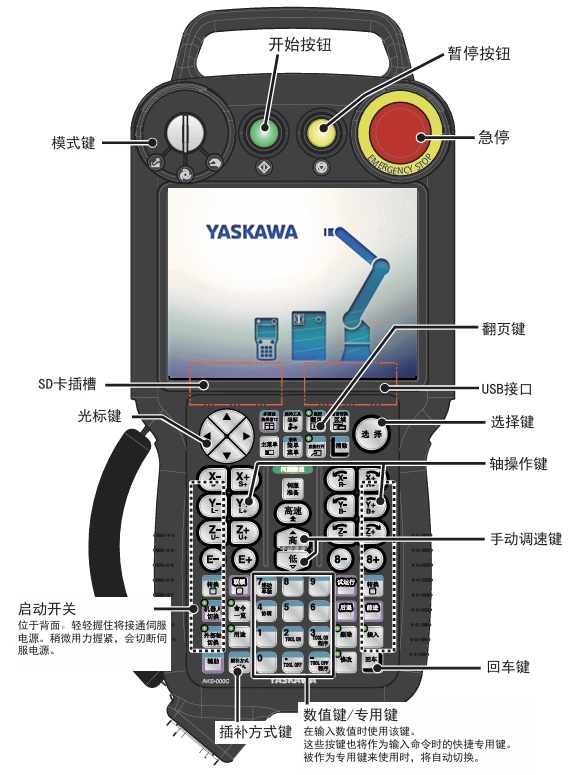
示教编程器
按键
开始

按下该按钮,机器人开始再现动作
暂停

按下该按钮,正在动作的机器人会暂停动作
急停

按下该按钮,伺服电源被切断,显示屏显示急停信息
模式

🚀 旋转选择【 PLAY 】,进入再现模式,可以进行示教完成的程序再现
🚀 旋转选择 【 TEACH 】,进入轴示教模式
🚀 旋转选择【 REMOTE 】,进入外部远程模式
启动开关

按下该开关,接通伺服电源
- 伺服接通 LED 灯闪烁以及模式键是 【 TEACH 】时,握住启动开关
- 接通伺服电源状态下松开启动开关,或者进一步紧握时,会切断伺服电源
选择

项目选择按键
方向键

按下该按键,可以移动光标
- 同时按下【 转换 】+ 【 ↑ 】往上滚动
- 同时按下【 转换 】+ 【 ↓ 】往下滚动
- 同时按下【 转换 】+ 【 → 】画面往右移动
- 同时按下【 转换 】+ 【 ← 】画面往左移动
主菜单

显示主菜单
- 同时按下【 主菜单 】+ 【 ↑ 】画面亮度 +
- 同时按下【 主菜单 】+ 【 ↓ 】画面亮度 -
简单菜单

显示简单菜单
长按 3 秒【 简单菜单 】显示弹出式窗口画面
伺服准备

按下该按钮,有效接通伺服电源,机器人才能动作
清除

解除当前状态的按键,类似撤销功能
多画面

按下该按钮,活动画面按顺序切换
同时按下【 转换 】+ 【 多画面 】,多画面和单画面显示窗口交替切换
坐标

手动操作机器人时,选择动作坐标系的按键
关节 、直角/圆柱 、工具 、用户
直接打开

按下该按钮,显示和当前操作有关的内容
- 显示程序内容时,光标键移动到命令上,按下该按钮,显示和该命令相关的内容
- CALL 命令:被调用的程序内容
- 作业命令:使用条件文件的内容
- 输入输出命令:输入输出状态
启用直接打开命令时,【 直接打开 】灯亮;灯亮时按下【 转换 】+【 直接打开 】,回到原始画面
翻页

按下该按钮,灯亮切换下一页
同时按下【 转换 】+【 翻页 】切换上一页
区域

同时按下【 转换 】+【 区域 】可以切换语言(可选 ✅)
转换

和其他按钮搭配使用
联锁

和【 试运行 】【 前进 】【 数字键 】【 机器人切换 】【 辅助 】按钮搭配使用
命令一览

程序编辑过程中,按下该按钮,可显示已登录的命令
机器人切换

按下该按钮,可进行机器人轴的轴操作
在一台 YRC1000 控制柜控制多台机器人系统
外部轴切换

按下该按钮,可以对外部轴(基座轴/工装轴)进行轴操作
插补方式

在程序编辑时,显示屏输入缓冲行上
每按一次,插补方式会按照 MOVJ → MOVL → MOVC → MOVS ... 顺序变化
辅助

呼叫功能(用于弧焊)
试运行

同时按下【 联锁 】+【 试运行 】机器人会按照已示教的程序点进行连续动作
开始动作后,松开【 联锁 】机器人也会持续动作,但是,如果松开【 试运行 】,机器人会停止动作
重要
按下【 联锁 】+【 试运行 】机器人动作前,请务必
前进

按下该按钮,机器人会按照示教的程序点动作
后退

按下该按钮,机器人会按照示教的程序点的反方向动作
删除

按下该按钮,已录入的命令就被取消,此按钮灯亮时,按下【 回车 】,完成删除
插入

按下该按钮,插入新的命令,此按钮灯亮时,按下【 回车 】,完成插入
修改

按下该按钮,更改示教结束的点位置数据或命令,此按钮灯亮时,按下【 回车 】,完成修改
回车

执行、命令、数据录入,编辑操作处理时,进行最终决定的按钮
手动速度

设定机器人手动操作的速度
- 微动 → 低 → 中 → 高
- 高 → 中 → 低 → 微动
高速

按下该按钮,在按【 轴操作键 】动作机器人时,机器人会高速移动
轴操作键
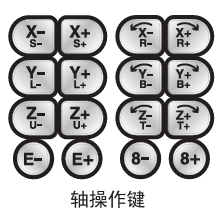
操作机器人各轴的按钮
数字键

显示区
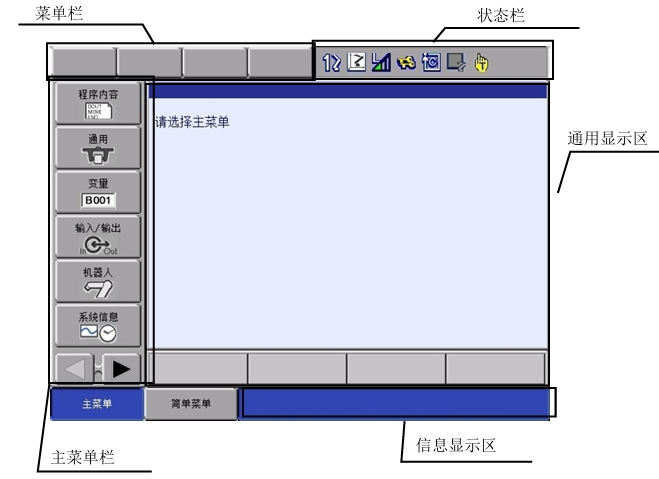
菜单栏

主菜单栏

状态栏
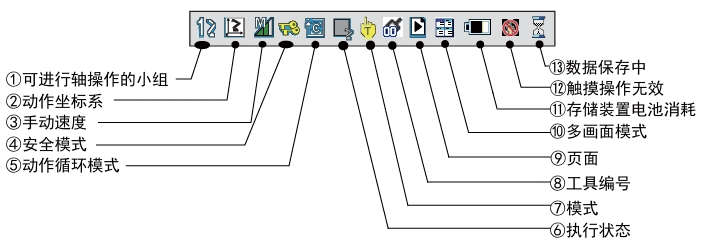
可进行轴操作的控制组
动作坐标系
手动速度

安全模式

动作循环模式

执行状态

模式

工具编号

通用显示区
显示程序

其他信息显示
信息显示区
单个信息

多个信息

显示多条信息时,将显示
 ,此时,界面区切换为活动窗口
,此时,界面区切换为活动窗口按【 选择 】后,正在发生的信息将以一览表的形式显示,可按【 清除 】隐藏 按下【 关闭 】或【 清除 】解除错误