00:00:00
示教与再现
程序登录
选择主菜单中的【 程序内容 】
选择【 新建程序 】

显示新建程序画面
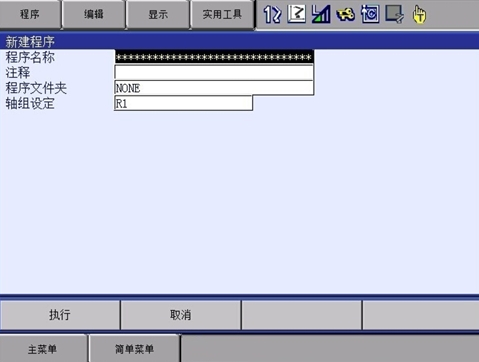
输入程序名称 将
光标选中程序名称后的输入框,按下【 选择 】,输入文字内容🔰 程序名称最多可输入 32 个半角字符( 16 个全角字符),可使用
数字、英文字母、符号和汉字
🔰 程序名称中可混用上述各类文字
🔰 当所输入的程序名称已被使用时,将显示输入错误按下【 回车 】或选择【 执行 】
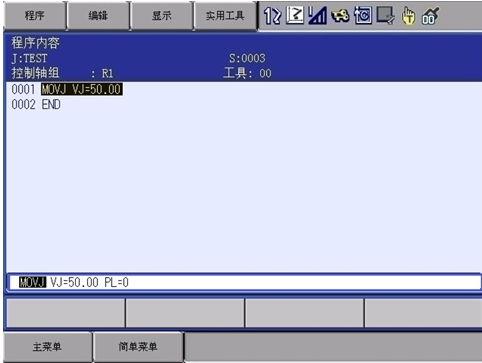
插补命令
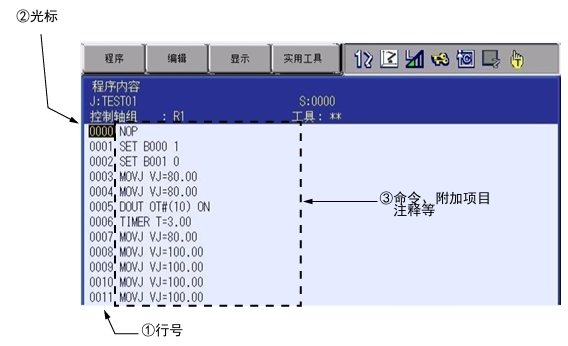
行号:自动显示,表示程序行的编号光标:按下【 选择 】后,可进行命令编辑命令、附加项目、注释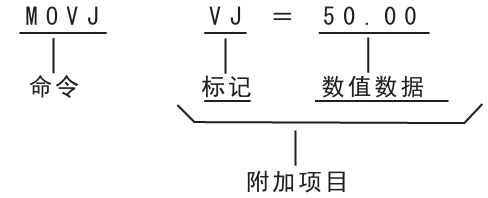
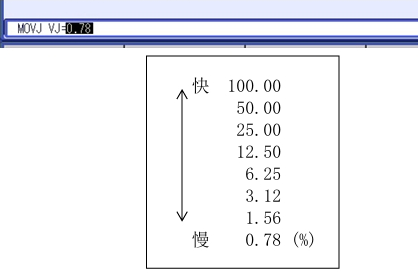
MOVJ 关节插补
通常第一个程序点,会使用关节插补来进行示教
再现速度调节:
🔰 将光标移到再现速度处
🔰 同时按下【 转换 】+【 ↑ 】或【 转换 】+【 ↓ 】,关节速度会升降变动
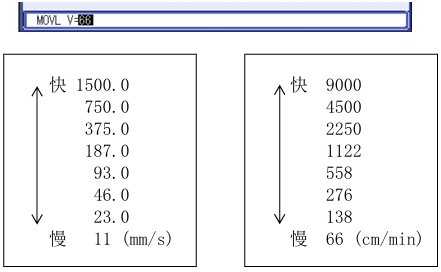
MOVL 直线插补
以直线轨迹示教的程序移动点 常用于焊接作业

再现速度调节:
🔰 将光标移到再现速度处
🔰 同时按下【 转换 】+【 ↑ 】或【 转换 】+【 ↓ 】,关节速度会升降变动
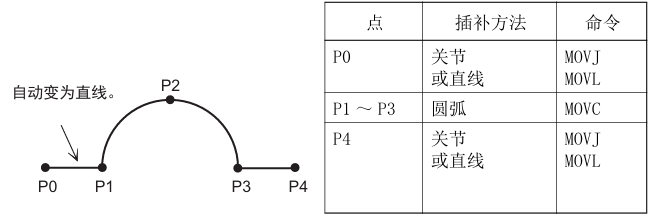
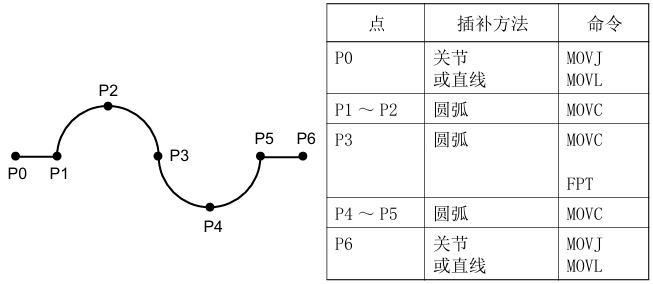
MOVC 圆弧插补
通过圆弧插补示教三点画一个圆弧,然后在圆弧上移动
单个圆弧
连续圆弧
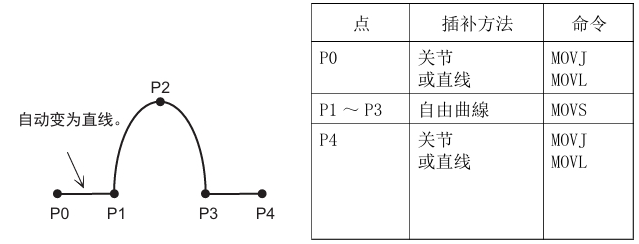
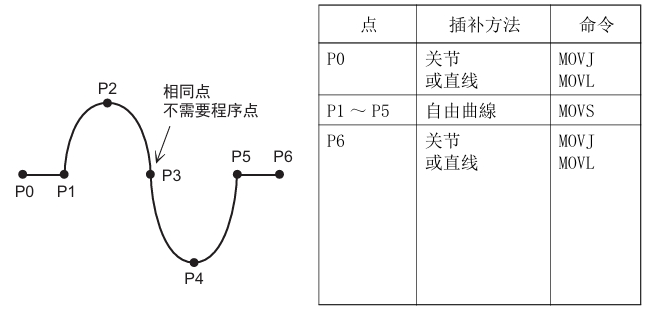
MOVS 自由曲线插补
不规则曲线示教
单条自由曲线
连续自由曲线
示教前准备
按下示教编程器的【 伺服准备 】,【 伺服接通 】LED 灯会闪烁
握住示教编程器的启动开关,会接通伺服电源 示教编程器的【 伺服接通 】LED 灯会亮起

松开示教编程器的启动开关,会切断伺服电源,【 伺服接通 】LED 灯会熄灭
伺服电源的ON/OFF
握住启动开关,会接通伺服电源,伺服接通 LED 灯会亮起,不过,一下子握得太紧,如果有“ 咔哧 ”声的话,会切断伺服电源。

程序示教
NOTE
示教按照 程序名称的登录 ➡ 示教 ➡ 再现 ➡ 示教的修改 依次进行
新建程序: 给程序命名 程序 = program
示教: 输入各程序点 ( 输入位置、插补、速度 ) 动作确认 ( 前进、后退、试运行 )
再现: 自动运行已示教的程序
修正: 如果程序有需要修正的地方,进行修正
每示教一个程序点,就会有一个移动命令
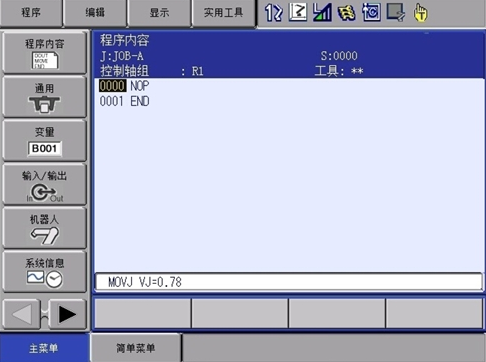
选择主菜单中的【 程序 】
选择【 程序内容 】

显示当前所选程序的内容

将
光标移至登录移动命令处的前一行握住启动开关
接通伺服电源
按下【 转换 】+【 坐标 】选择目标工具编号
按下【 转换 】+【 坐标 】返回程序内容页面
按下【 轴操作键 】 移动机器人
按下【 插补 】选择插补方法 MOVJ ➢ MOVL ➢ MOVC ➢ MOVS
再现
速度修改- 光标移至
命令行

- 按下【 选择 】,光标移至输入缓冲区

光标移至再现
速度处
同时按下【 转换 】+【 ↑ 】或【 转换 】+【 ↓ 】,关节速度升降变动
按下【 回车 】移动命令登录完成

- 光标移至
定位等级(精度)
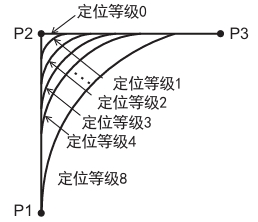
使用方法
选择
移动光标到移动命令处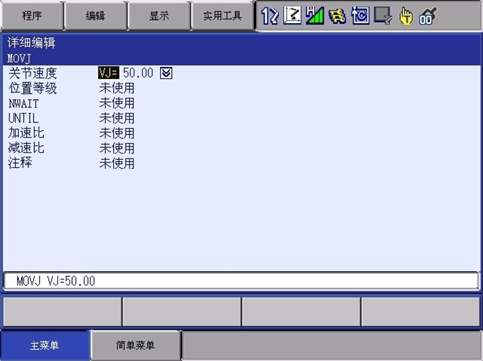
选择定位等级中的位置“ 未使用 ”

选择 " PL= "
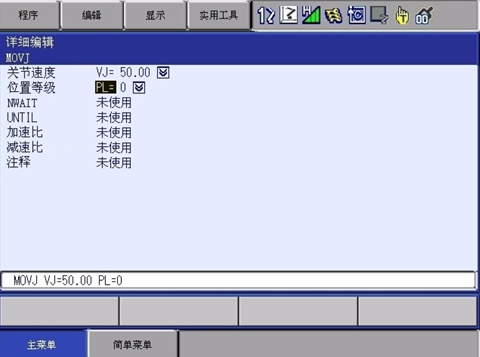
按下【 回车 】
再次按下【 回车 】
程序点确认
前进

按下该按钮,机器人会按照示教的程序点动作
只按下【 前进 】,只执行移动命令
同时按下【 联锁 】+【 前进 】,执行所有的命令
动作在进行 1 个循环之后结束 到达 END 命令后,即使再按下【 前进 】,机器人也不会动作
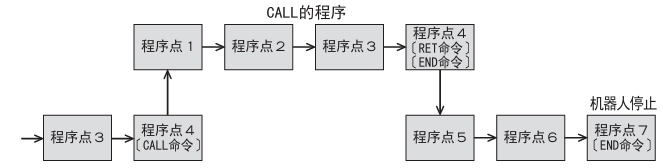
当有 CALL 程序时,会向 CALL 命令的下一个命令前进
后退

按下该按钮,机器人会按照示教的程序点的反方向动作
只执行移动命令
到达第 1 个程序点后,即使再按下【 前进 】,机器人也不会动作
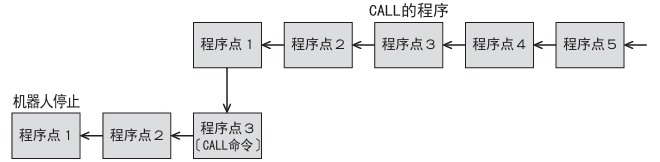
当有 CALL 程序时,会返回到 CALL 命令之前的移动命令上

修改程序点
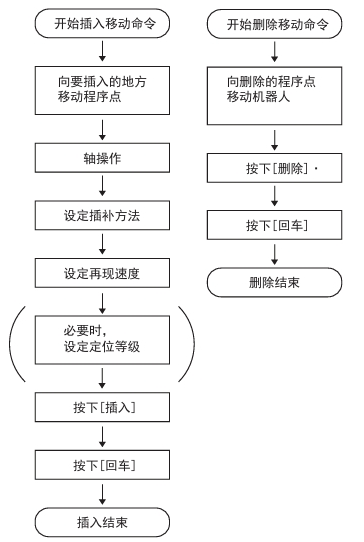

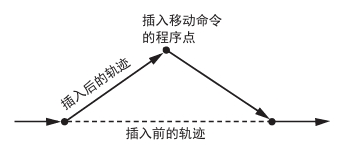
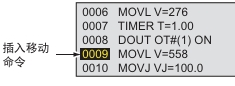
插入移动命令
注意
插入命令前,请先接通伺服电源
在程序画面,将
光标移动到要插入移动命令的前一行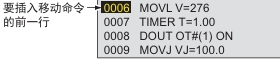
接通伺服电源,按下【 轴操作键 】,移动机器人到插入位置
在输入缓冲区确认所显示的移动命令,插补方法,再现速度
按下【 插入 】
等待【 插入 】LED 灯亮起后,按下【 回车 】
再次按下【 回车 】
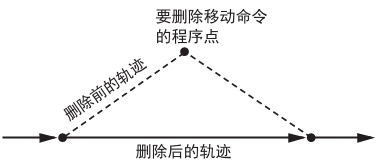
删除移动命令
在程序画面,移动
光标到要删除的移动命令上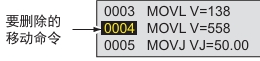
按下【 删除 】
等待【 删除 】LED 灯变亮,按下【 回车 】
更改位置数据
- 在程序画面,移动
光标到要更改的移动命令上 - 接通伺服电源,按下【 轴操作键 】,移动机器人到更改后的位置上
- 按下【 修改 】
- 等待【 修改 】 LED 灯变亮,按下【 回车 】
- 位置数据将
更改为机器人当前位置
调用程序
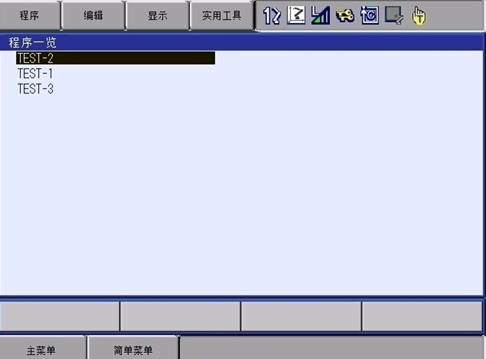
选择主菜单中的【 程序 】
选择【 程序 】

选择目标程序
登录主程序
选择主菜单中的【 程序 】
选择【 主程序 】

按下【 选择 】

选择【 登录主程序 】
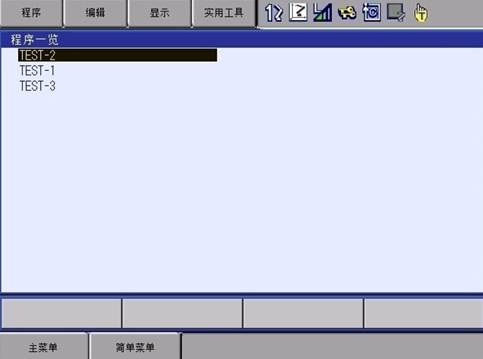
选择目标程序作为主程序
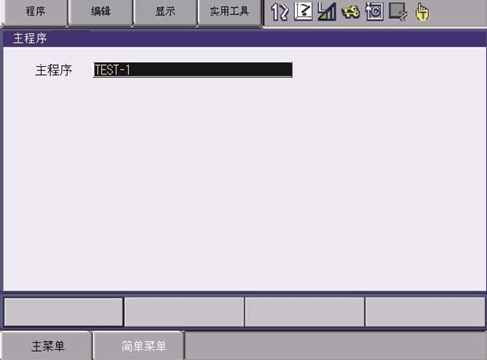
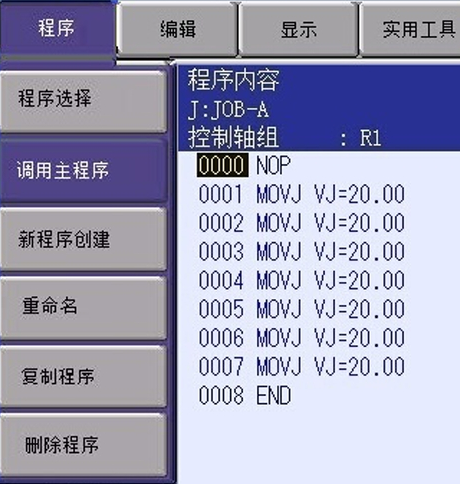
调用主程序
选择菜单中的【 程序 】
选择【 调出主程序 】
再现
警告
在操作机器人前,必须先确认机器人附近无人后,再操作机器人
将示教编程器的模式切换到 PLAY
按下示教器上的【 伺服准备 】

等待示教器上的【 伺服接通 】LED 灯亮起
按下示教器上的【 START 】

示教器上的【 START 】灯亮起,机器人开始动作
预约启动
使用工装上的按钮,按照预约顺序,启动各工装登录程序
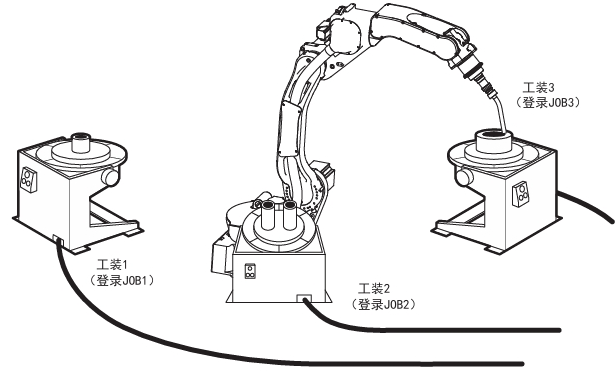
NOTE
准备好工件 1 后,按下工装 1 的启动按钮后,机器人就会执行 JOB1
在执行 JOB1 时,准备好工件 2、工件 3,并按顺序启动对应工装上的按钮
此时,虽然还在执行 JOB1 ,但会按照启动按钮顺序进行作业预约,随后按照预约程序执行指令
设定
选择主菜单中的【 设置 】
选择【 功能有效设定 】
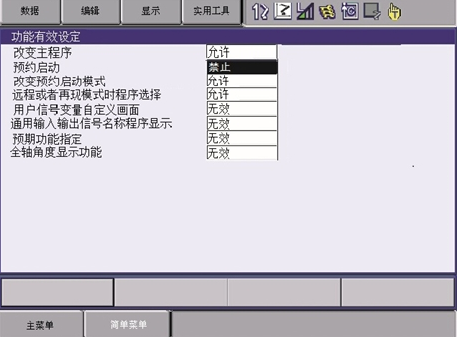
选择
预约启动,按下【 选择 】使其状态改为允许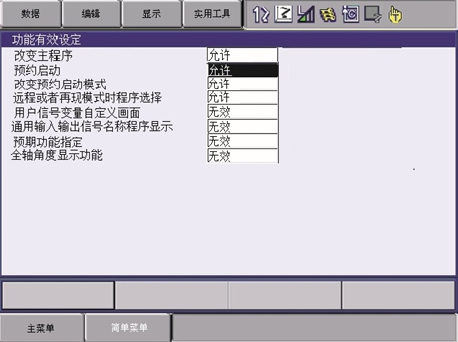
选择主菜单中的【 设置 】
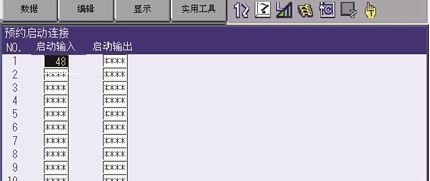
选择【 预约启动连接 】
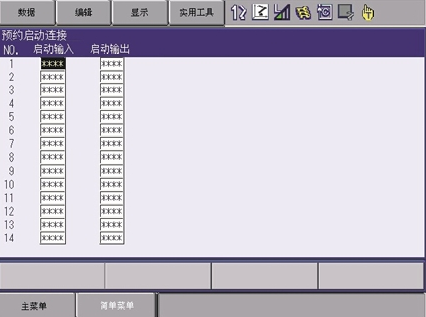
选择各工装的
启动输入或启动输出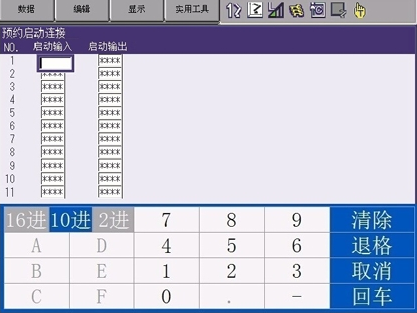
输入目标登录信号编号的数值,按下【 回车 】
选择主菜单中的【 设置 】
选择【 预约启动程序 】
“ ● ”为连接预约启动,已登录预约启动输入输出信号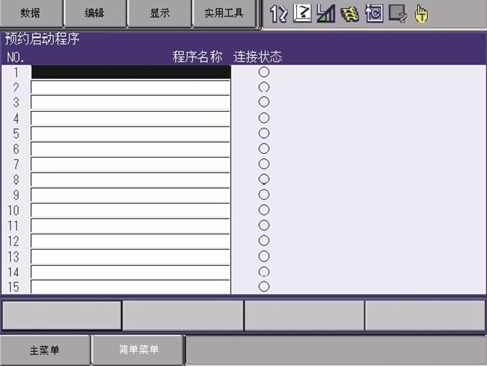
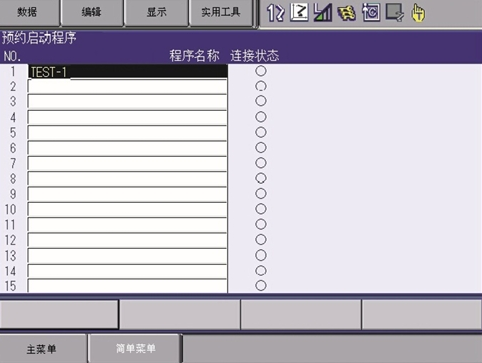
选择各工装的
程序名称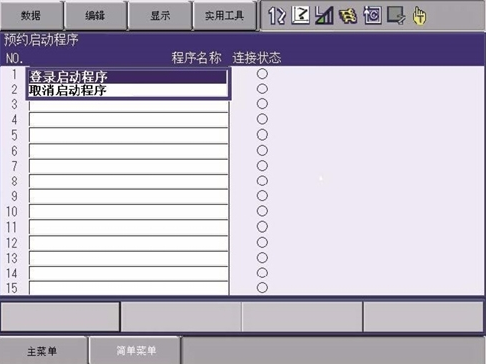
选择
登录启动程序选择登录程序
取消工装已登录的程序:
选择主菜单中的【 设置 】
选择【 预约启动程序 】
选择要删除的
程序名称
选择取消启动程序

启动
将示教编程器的模式切换到 PLAY
按下工装的启动按钮
选择主菜单中的【 设置 】
选择【 作业预约状态 】
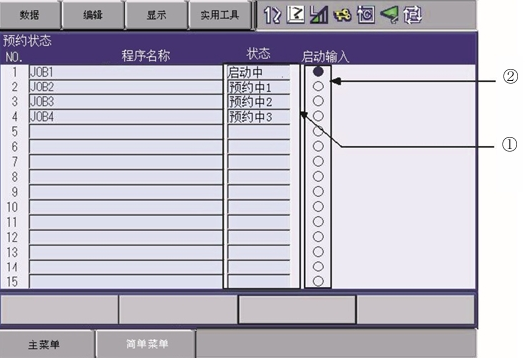
① 显示当前作业的预约状态
② 显示输入信号状态
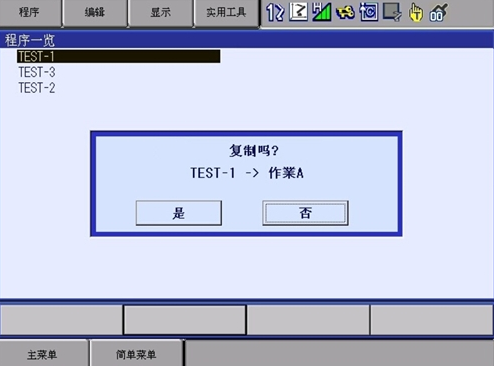
程序复制
选择主菜单中的【 程序 】
选择【 程序选择 】
移动
光标到目标源程序处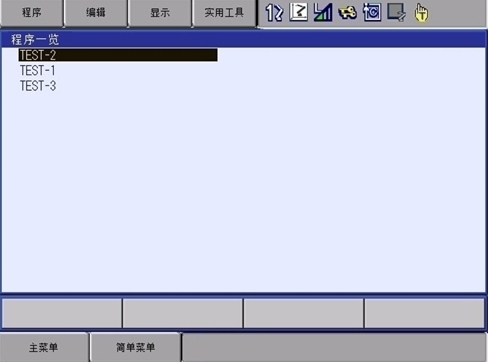
选择下拉菜单中的程序
选择【 复制程序 】
输入新程序名称

按下【 回车 】