00:00:00
工具文件的设定
工具文件
工具文件: 通过正确登录工具的基准点(控制点),可正确进行插补动作,呈现出精度更高的轨迹
在使用工具坐标、做控制点固定动作时,也需要设定工具文件
工具文件最多能登录 64 种,工具文件编号标是 0~63。每一个文件称为工具文件
| 文件编号 | 控制点 |
|---|---|
 |  |
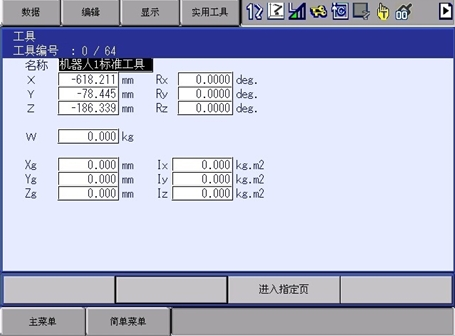
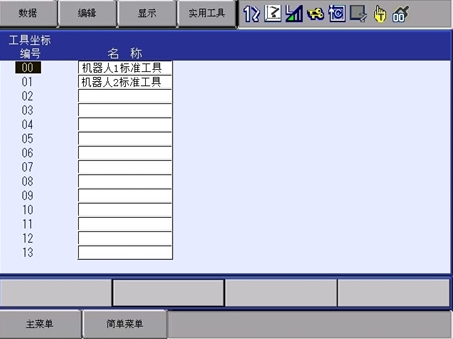
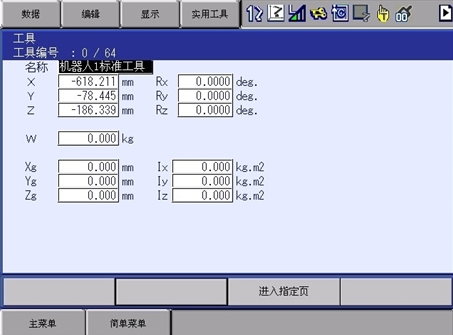
通过输入数值来登录工具文件
选择主菜单中的【 机器人 】
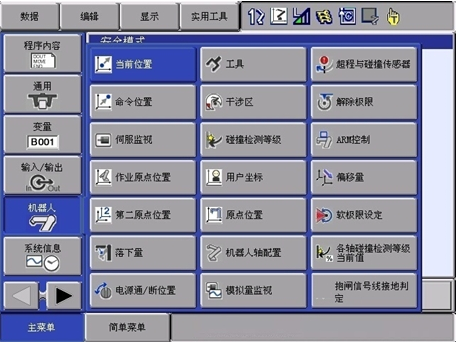
选择【 工具 】
在工具一览画面中,将光标移动到目标序号上,按下【 选择 】

选择目标工具编号
在对应位置输入数值
按下【 回车 】

例:下面图中工具 A、工具 B、工具 C 的设定
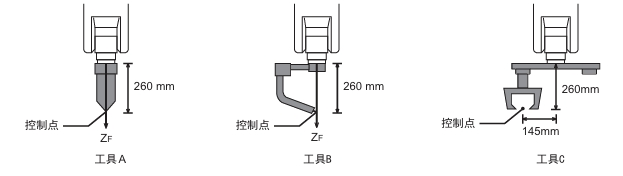
- 工具 A 和 B 时

- 工具 C 时

工具姿势数据
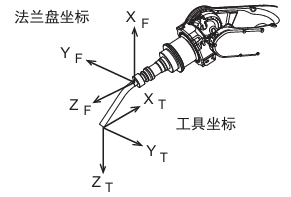
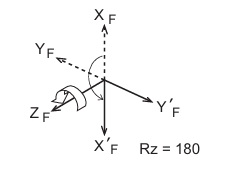
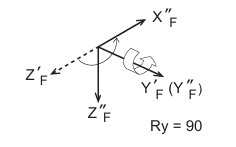
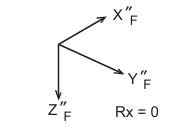
工具姿势数据☞ 是表示机器人法兰盘坐标和工具坐标之间的角度的数据
法兰盘坐标和工具坐标调整到一致时的角度数据
朝着箭头方向右转为正方向,以 Rz → Ry → Rx 的顺序登录
例:下图所示工具、登录 Rz=180、Ry=90、Rx=0
选择主菜单中的【 机器人 】
选择【 工具 】
在工具一览画面中,将
光标移动到目标序号上,按下【 选择 】选择目标工具编号
选择要登录的轴 【 Rz 】
输入转动角度值 【 180 】
按下【 回车 】

选择要登录的轴 【 Ry 】
输入转动角度值 【 90 】
按下【 回车 】
选择要登录的轴 【 Rx 】
输入转动角度值 【 0 】
按下【 回车 】

扩展
通常 1 台机器人只使用 1 种工具文件 通过使用工具文件扩展功能, 1 台机器人可以切换使用多种工具文件S2C431: 工具号切换指定 (1: 可切换, 0: 不可切换) 初始值为 “ ※0 "
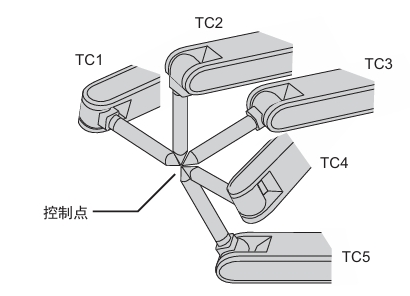
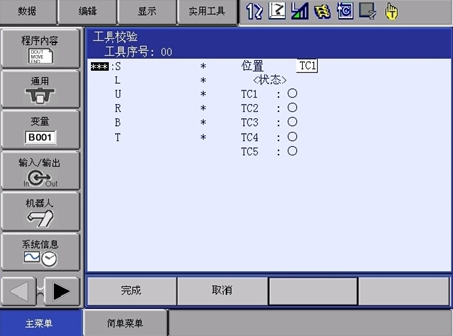
工具校准
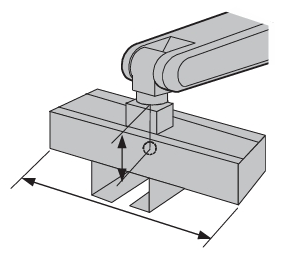
以控制点为基准点取5个不同的姿势(TC1~5)。根据这 5 个数据,可自动算出工具尺寸
选择主菜单中的【 机器人 】
选择【 工具 】
选择目标工具编号
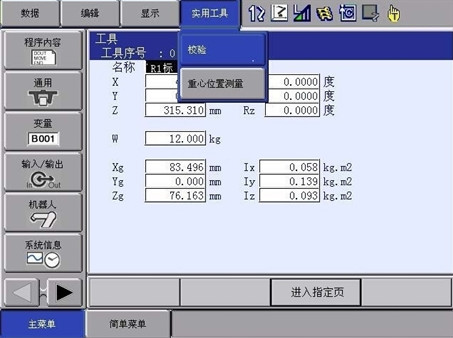
选择菜单中的【 实用工具 】
选择【 校验 】
显示工具校验设定画面
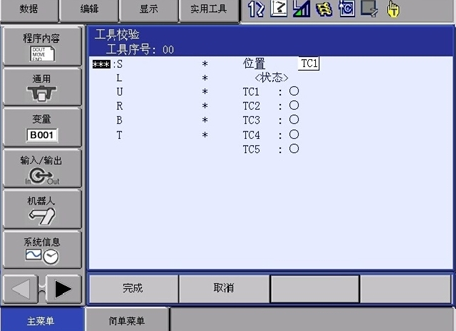
设定目标机器人

设定位置

通过【 轴操作 】将机器人移动到目标位置
按下【 修改 】、【 回车 】
重复操作,完成 TC1 ~ TC5 位置的示教,按下【 前进 】机器人就会移动到该位置
画面中 “●” 表示示教完成 ,“O” 表示未完成
选择 “ 结束 ”
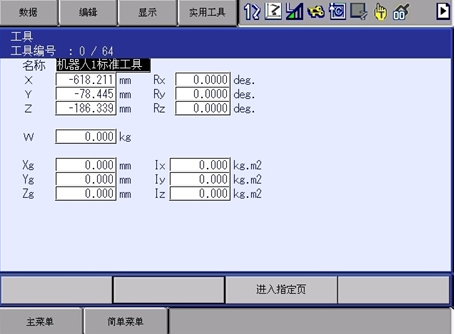
校准完成后,显示工具坐标画面
清空校准数据
在工具校准设定画面上,选择菜单中的【 数据 】

选择【 清除数据 】
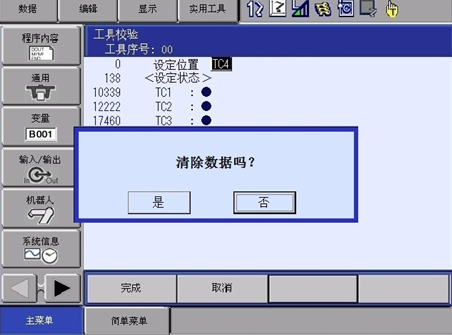
选择 “ 是 ”
测定工具重量、重心
重要
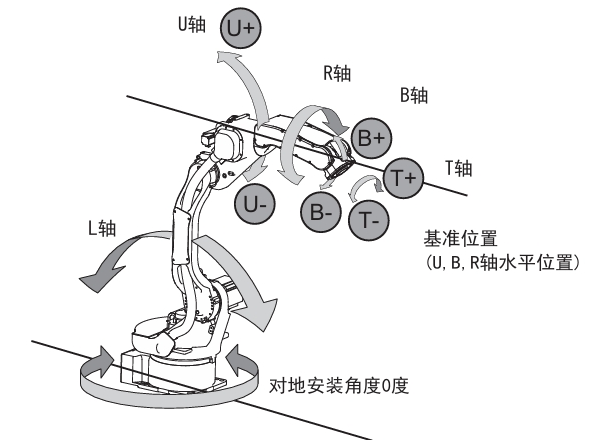
此功能适用于机器人对地安装角度为 0 时
选择主菜单中的【 机器人 】
选择【 工具 】
选择目标工具编号

选择菜单中的【 实用工具 】
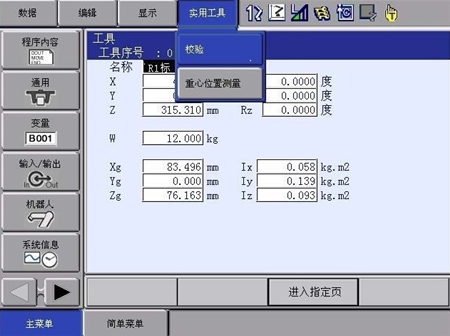
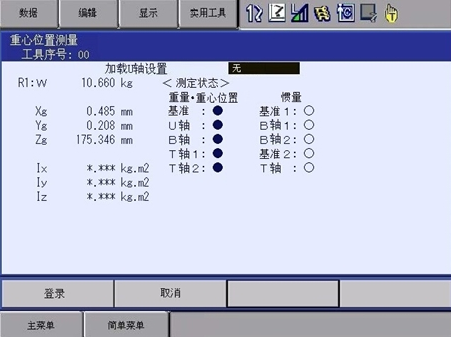
选择【 重心位置测量 】 显示重心位置测量画面
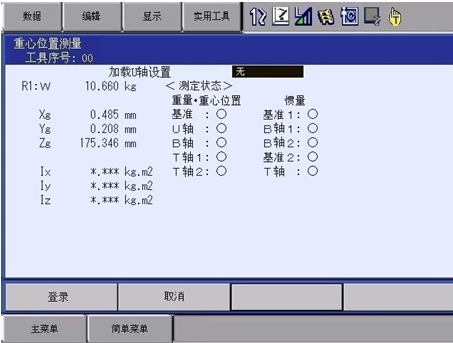
按下【 前进 】 自动调整机器人到基准位置( U、B、 R 轴水平位置)
再次按下【 前进 】 开始测定
按以下顺序操作机器人来进行测定
✅ 测定完成的项目,由“ O ”变为“ ● ”
U 轴测定: U 轴基准位置 + 4.5 度 ➡ - 4.5 度B 轴测定: B 轴基准位置 + 4.5 度 ➡ - 4.5 度T 轴第一次测定: T 轴基本位置 + 4.5 度 ➡ - 4.5 度T 轴第二次测定: T 轴基准位置 + 60 度 ➡ + 4.5 度 ➡ - 4.5 度
测定过程中(变为“ ● ”前)松开【 前进 】,会中断测定,再次测定时,从“ 基准位置 ”开始
重量、重心测定完成 ✅ 后,状态全部变成“ ● ”,画面中会显示测定数据

选择“ 登录 ”
测定旋转转动惯量
先完成 ✅ 工具重量、重心的测定
按下【 前进 】 机器人向重心位置旋转转动惯量的测定基准 1
( U 轴:水平位置,R 轴:B 轴的旋转轴与地面垂直,T 轴:原点位置 + 90 度)方向移动再次按下【 前进 】
开始 B 轴 1、B 轴 2 的测定B 轴 1 测定: B 轴基准位置 + 30 度 ➡ B 轴基准位置 ➡ - 30 度
向 B 轴 2 的测定位置移动:T 轴原点位置B 轴 2 测定: B 轴基准位置 + 30 度 ➡ B 轴基准位置 ➡ - 30 度
测定完成时,显示 B 轴 1、B 轴 2 的测定结果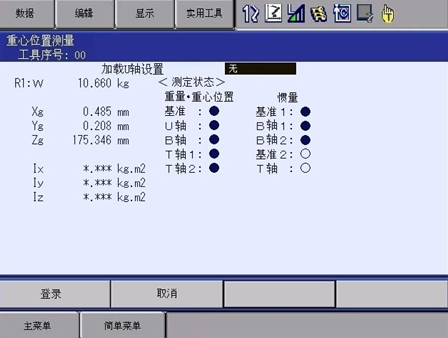
按下【 前进 】 机器人向重心位置旋转转动惯量的测定基准 2
( R 轴:B 轴的旋转轴与地面水平,B 轴:与地面垂直)方向移动再次按下【 前进 】
开始 T 轴的测定T 轴的测定: T 轴基准位置 + 30 度 ➡ T 轴基准位置 ➡ - 30 度
测定完成后 , 显示T轴的测定结果
选择“ 登录 ”
工具重量信息
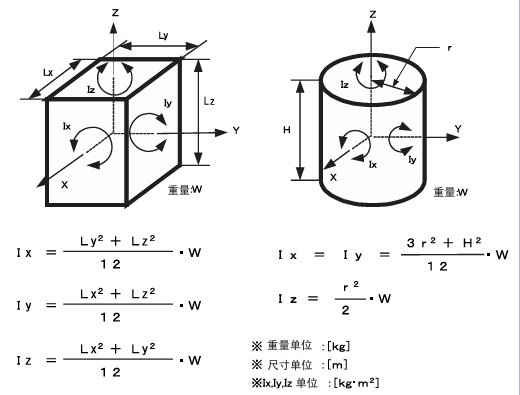
工具重量信息包括安装在法兰盘上的工具的总重量、重心位置、重心位置转动惯量。这些信息登录在工具文件中
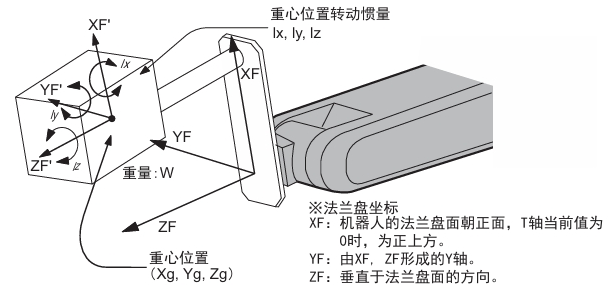
- 重量: W ( 单位:kg )
- 重心位置 : xg 、 yg 、 zg ( 单 位 :mm )
- 重心位置转动惯量 : Ix 、 Iy 、 Iz ( 单 位 :kg·m2 )
长方体、圆柱体自身的惯量计算方法