00:00:00
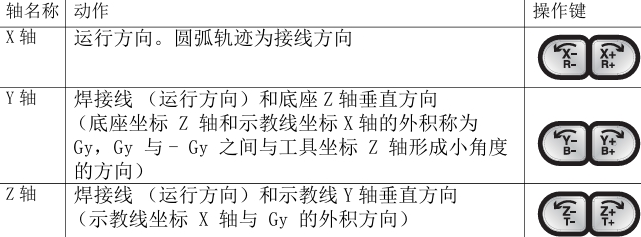
坐标系
坐标系
按下【 坐标 】选择操作对象的坐标系
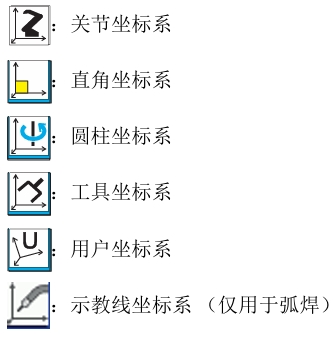
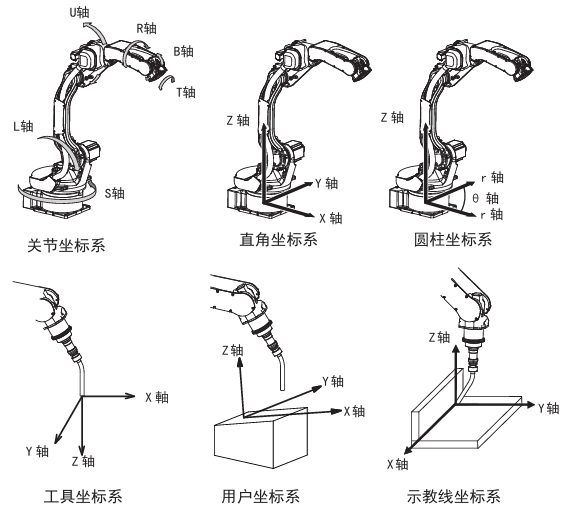
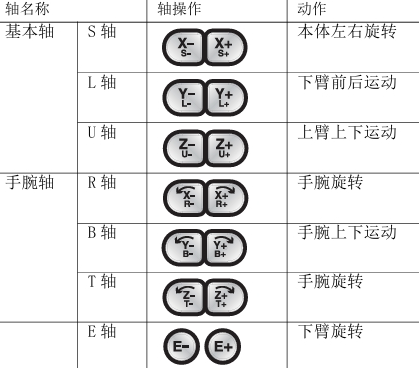
关节坐标系
可单独操作机器人各轴动作
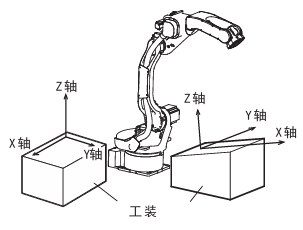
直角坐标系
机器人平行于本体轴的 X 、Y、Z 轴进行动作
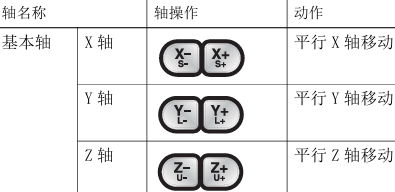
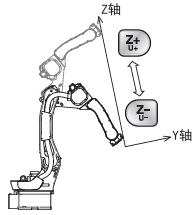
在 X、Y 轴方向动作
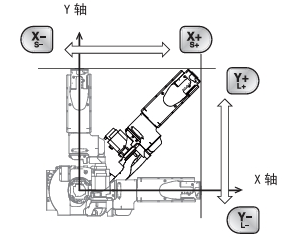
在 Z 轴方向动作

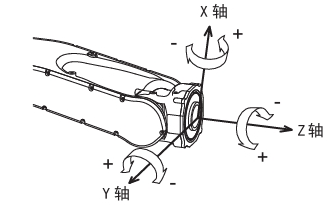
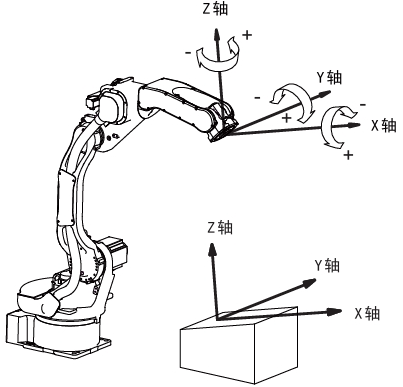
本体轴的 X 、Y、Z 轴为基准作旋转动作

圆柱坐标系
机器人绕本体轴的 Z 轴作旋转运动,或和 Z 轴作直角平行运动


本体轴的 X 、Y、Z 轴为基准作旋转动作
工具坐标系
机器人平行于定义在工具前端的 X、Y、Z 轴进行动作
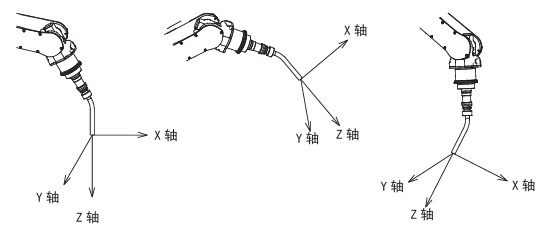
工具坐标将机器人手腕法兰盘上安装的工具有效方向作为 Z 轴,将坐标定义在工具的前端 因此,

以工具坐标系的 X 、Y、Z 轴为基准作旋转动作
用户坐标系
将机器人动作区域中的任意位置设定任意角度的 X、Y、Z 直角坐标系,机器人平行于这些轴进行动作
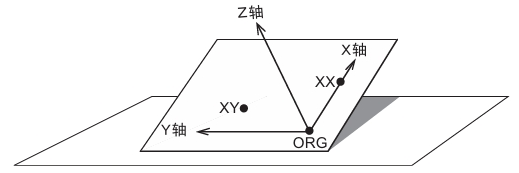
ORG 是原点, XX 是 X 轴上的点 XY 是用户坐标 Y 轴一侧的示教点,选定此点后可以决定 Y 轴和 Z 轴的方向
在 X、Y 轴方向动作
在 Z 轴方向动作
以用户坐标系的 X 、Y、Z 轴为基准作旋转动作
注意
同时按下多个【 轴操作键 】,机器人将进行多轴同时动作 但是,当同时按下任意轴的两个相反的方向按键,比如【 S- 】+【 S+ 】,此时机器人不得动作
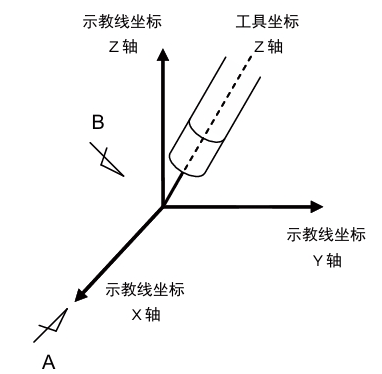
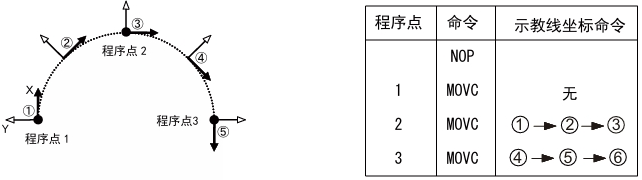
示教线坐标(仅弧焊)
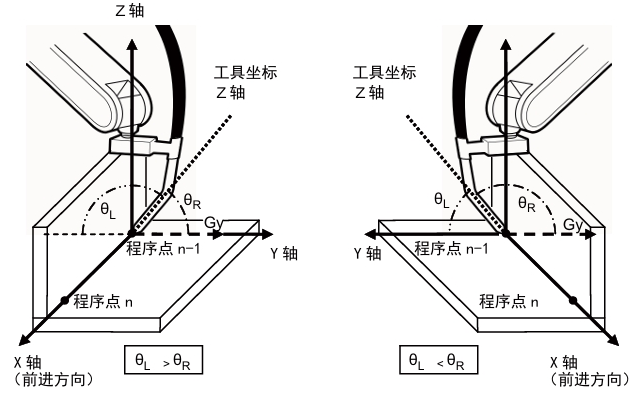
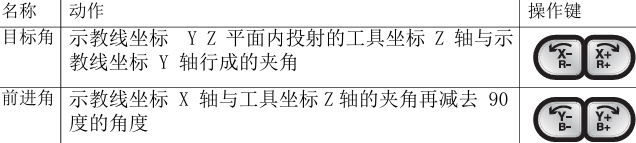
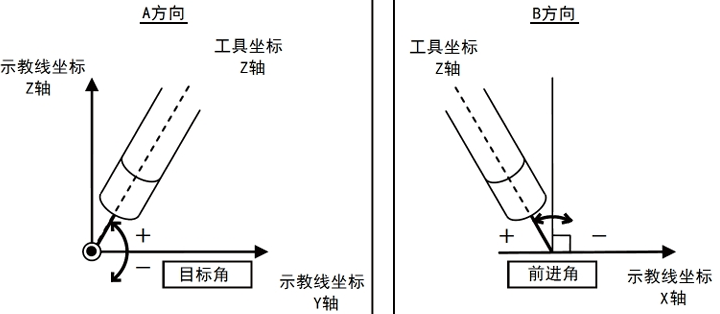
目标角和前进角:
程序示教:
直线

圆弧
工具坐标的选择
按下【 坐标 】,选择工具坐标系

按下【 转换 】+【 坐标 】 显示工具选择画面

光标选中要使用的工具按下【 转换 】+【 坐标 】
用户坐标的选择
按下【 坐标 】,选择用户坐标系

按下【 转换 】+【 坐标 】 显示用户坐标编号选择画面
光标选中目标用户坐标号
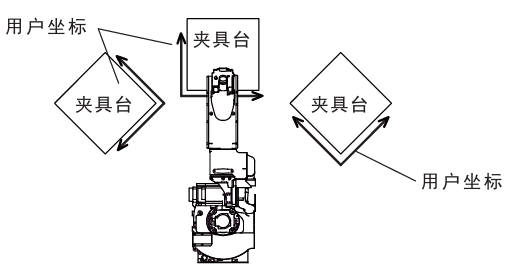
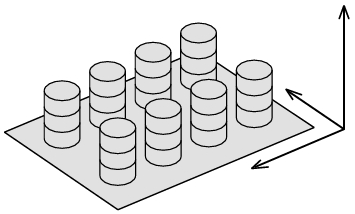
使用示例:
有多个工装夹具时
码垛作业
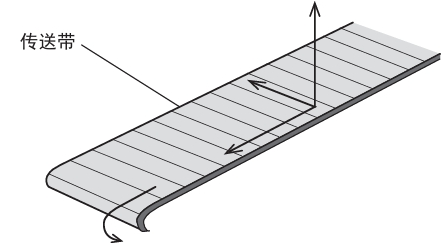
传送带同步移动
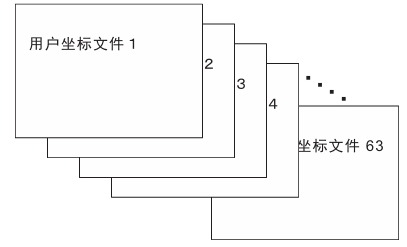
用户坐标最多能设 63 种,每个用户坐标有一个坐标序号(1~63),这些文件称为用户坐标文件
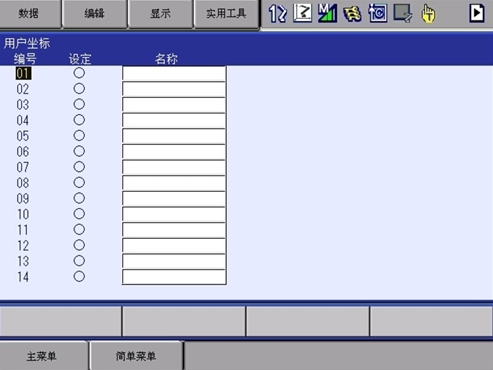
用户坐标的设定
轴示教
选择主菜单中的【 机器人 】
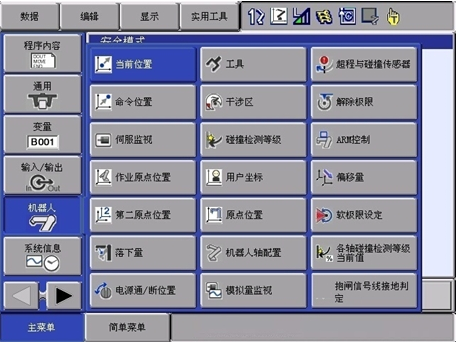
选择【 用户坐标 】

已设定用户坐标,设置会显示“ ● ”
选择菜单中的【 显示 】➡【 坐标值 】,可显示出用户坐标画面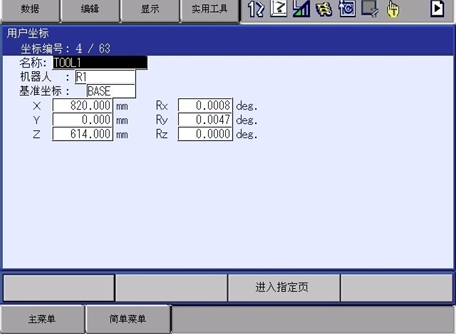
移动
光标到要设定的用户坐标序号上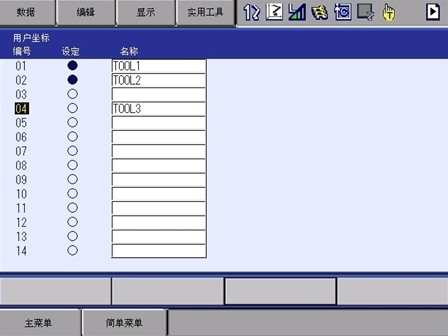
按下【 选择 】 显示用户坐标设定画面

选择目标机器人
选择画面左上方的“ ** ”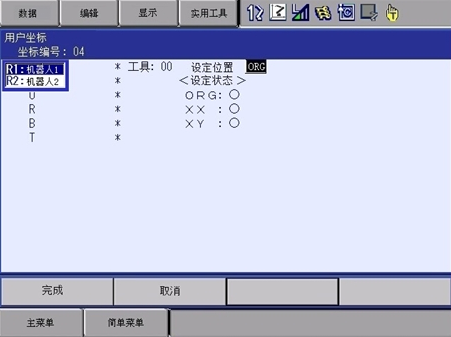
选择“ 设定位置 ”

通过【 轴操作键 】移动机器人到目标位置
按下【 修改 】、【 回车 】
重复进行操作,示教设定位置 ORG、XX、XY
画面中显示“ ● ”表示示教完成,“ O ”表示未完成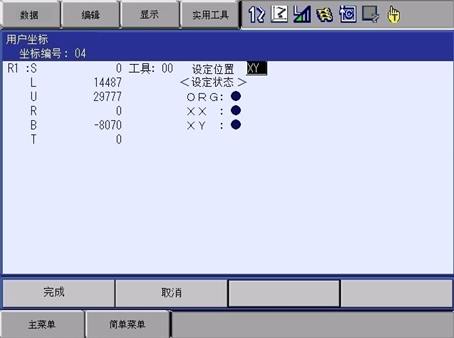
NOTE
机器人的当前位置与画面中所显示的位置数据不同时,显示设定位置的“ORG”“XX”“XY”显示灯会闪烁
选择【 完成 】

直接输入
移动
光标到用户坐标序号
选择菜单的【 显示 】
选择【 坐标轴 】
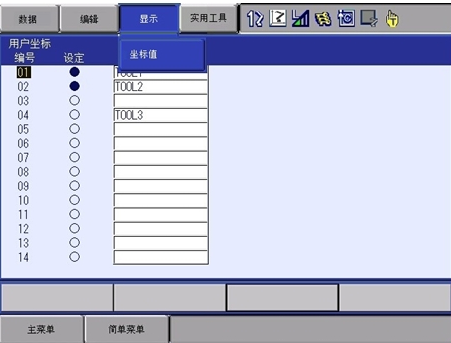
显示用户坐标画面
选择“ 机器人 ”和“ 基准坐标 ”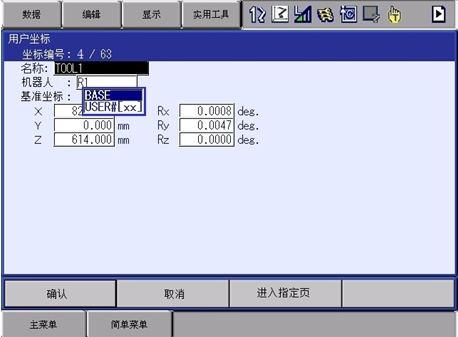
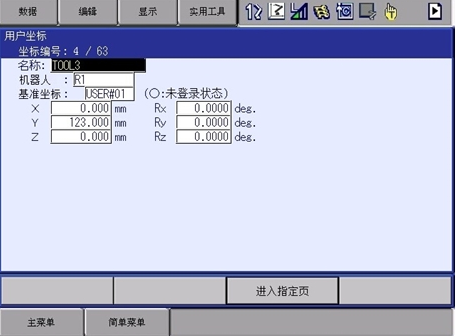
选择对应目标项,输入数值

选择【 显示 】

清除用户坐标数据
选择菜单中的【 数据 】
选择【 清除数据 】
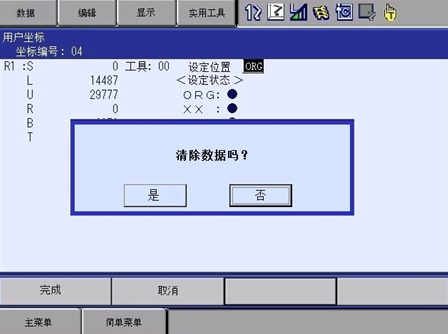
选择“ 是 ”
将清除所有数据