00:00:00
作业原点
创建原点
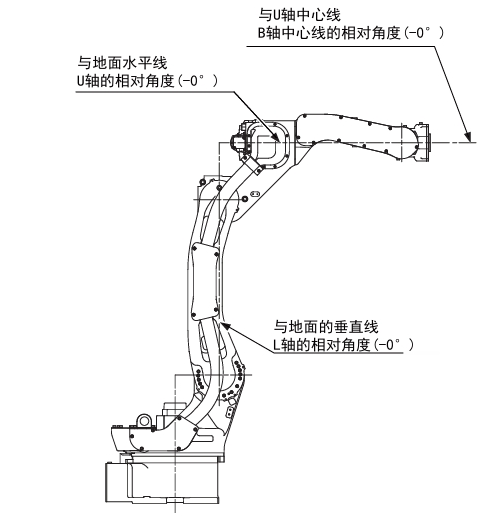
原点位置校准是将机器人位置与编码器位置进行对照确认,
原点位置是 ☞ 各轴在 0 脉冲时的位置,此时的姿态叫做原点位置姿势
创建原点位置,有以下两种操作方法:
全轴同时创建:更换机器人和控制柜各轴单独创建:更换马达或编码器时
全轴同时登录
选择主菜单 【 机器人 】
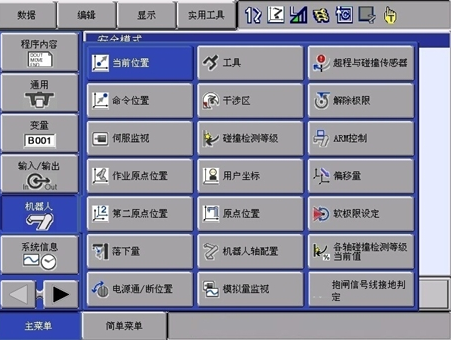
选择【 原点位置 】
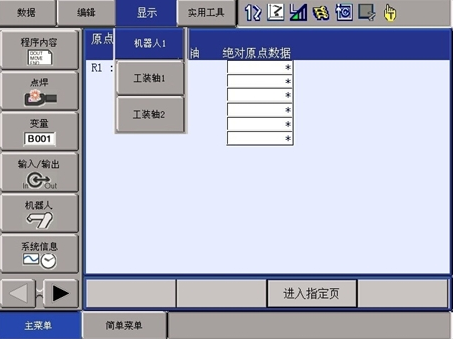
在菜单中的【 显示 】选择控制轴组
选择菜单中的【 编辑 】
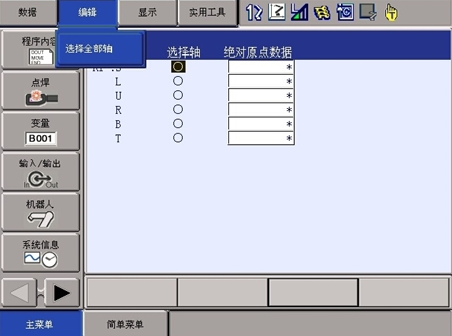
选择【 选择全部轴 】

选择“ 是 ” 将所显示全轴的当前值,将被作为原点数据登录
各轴单独创建
选择主菜单 【 机器人 】
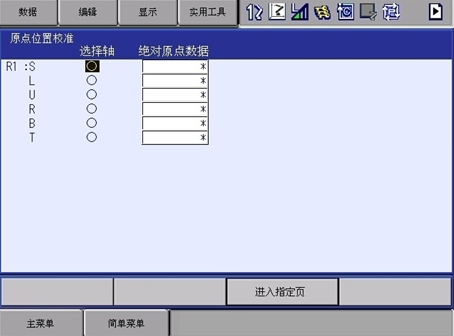
选择【 原点位置 】
在菜单中的【 显示 】选择控制轴组
将
光标移至目标轴,并选中
显示确认对话框

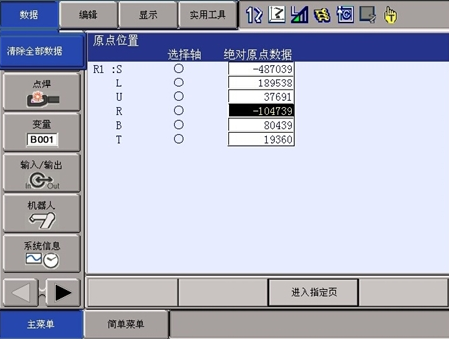
选择“ 是 ” 显示各轴的当前值,将被作为原点数据登录
NOTE
可直接对目标轴原点数据进行更改
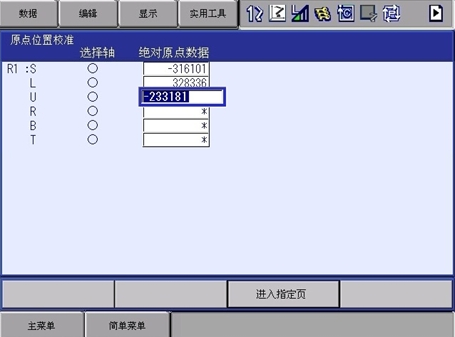
输入绝对数据,按下【 回车 】,绝对原点数据被更改
清空原点数据
选择主菜单 【 机器人 】
选择【 原点位置 】
选择菜单中的【 数据 】
选择【 清空全部数据 】
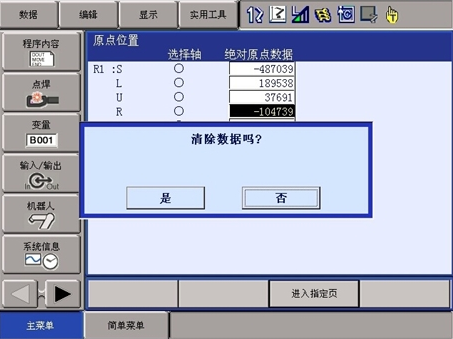
选择“ 是 ” 将清空所有数据
作业原点
作业原点是与机器人作业相关的基准点
该点作为启动生产线等的前提条件,需要将机器人限制在设定范围内,使其不与周边设备发生干扰
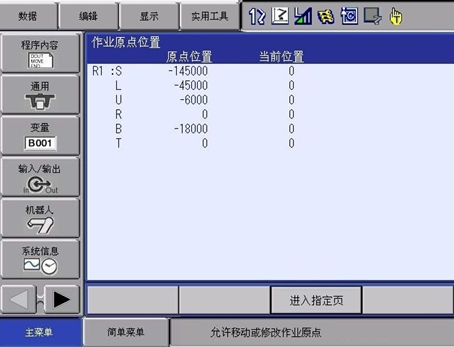
作业原点的显示
选择主菜单中的【 机器人 】
选择【 作业原点位置 】
作业原点的更改
- 在作业原点位置画面按下【 轴操作键 】
- 将机器人移动到新的作业点位置
- 按下【 修改 】、【 回车 】
- 将更改作业原点位置
移动到作业原点
- 选择并确认【 坐标 】
- 点亮 【 伺服接通 】
示教模式下,在作业原点位置画面按下【 前进 】
使机器人向作业原点位置移动。当周围有干扰物体,无法直接移动时,请先通过【 轴操作 】来到可以移动的位置,再按【 前进 】键