
Press Ctrl+ and K to search
目录
坐标系的理解
- ROBROOT 机器人足部坐标系
- WORLD 世界坐标系
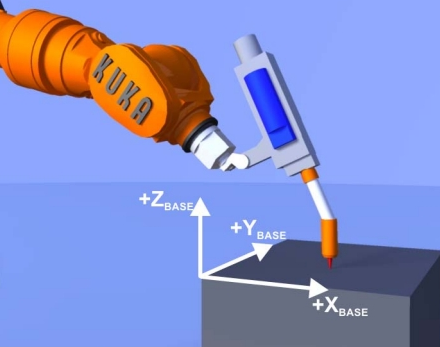
- BASE 基坐标系
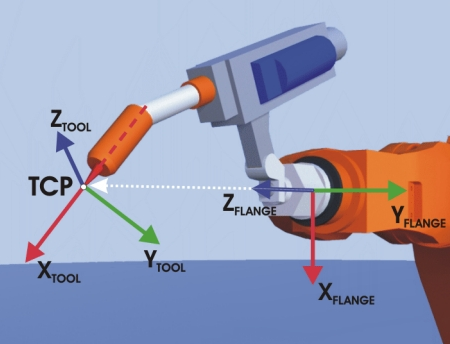
- TOOL 工具坐标系
- FLANGE 法兰坐标系
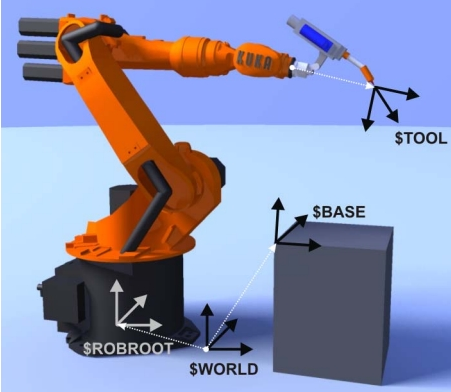
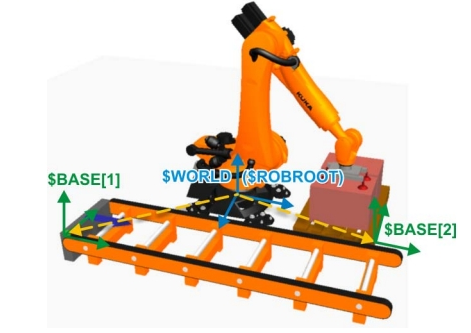
世界坐标系(World Coordinate System):固定在机器人的基础上,通常用于描述机器人整体位置。
工具坐标系(Tool Coordinate System):固定在末端执行器上,用于描述末端工具的工作姿态。
基座坐标系(Base Coordinate System):机器人基座的位置和朝向,用于描述机器人工作环境中的空间。
坐标系转换:如何在不同坐标系之间转换与应用。
机器人运动学基础
正向运动学(Forward Kinematics):根据机器人关节角度计算末端执行器的位置。
逆向运动学(Inverse Kinematics):根据末端执行器的位置计算机器人关节角度。
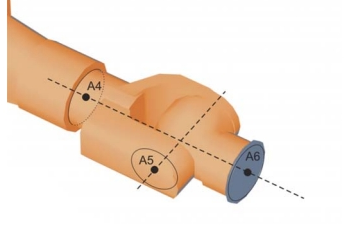
顶奇异点 1 A5中点垂直A1
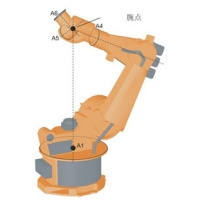
延伸位置奇异点2 A5中点位A2A3延长线
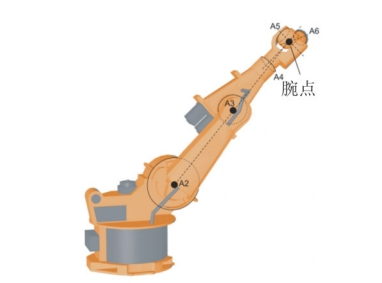
手轴奇异点5 A4与A6平行 A5处于+—0.01812°
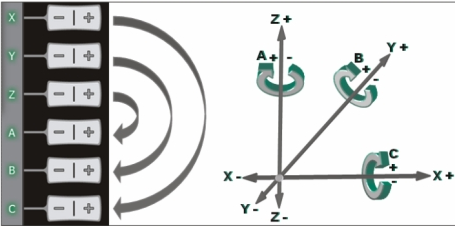
轴 全局 基坐标系 工具
外部TCP
用一个固定工具进行手动移动
- 1.在工具选择窗口选择 由机器人导引的工件
- 2.在基坐标选择窗口选择 固定工具
- 3.将ipomode模式设为 外部工具
- 4.作为工具设定
-
- 工具设定,以便在工件坐标系中移动
-
- 基坐标设定,以便在外部工具坐标系中移动
- 5.手动倍率
- 6.按下使能开关的中间位置并保持按住
- 7.移动
外部TCP (如涂胶、焊接等)
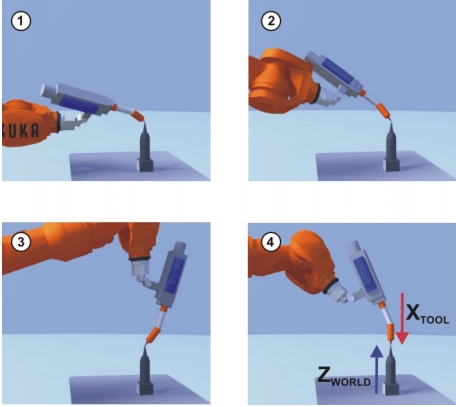
TCP 校正
- 选择主菜单序列 投入运行 测量 工具 XYZ 4 点
- 为待测量的工具给定一个号码和一个名称。 用继续键确认
- 用 TCP 移至任意一个参照点。 按下软键测量,对话框 “ 是否应用当前位置? 继续测量 ” 用是加以确认
- 用 TCP 从一个其他方向朝参照点移动。 重新按下测量,用是回答对话框提问
- 把第 4 步重复两次
- 负载数据输入窗口自动打开。 正确输入负载数据,然后按下继续
- 包含测得的 TCP X、Y、Z 值的窗口自动打开,测量精度可在误差项中读取。 数据可通过保存直接保存
XYZ4点 (4个不同姿态的点位)
数字输入(可自定义输入)
测量基坐标
相关信息
基坐标测量只能用一个事先已测定的工具进行 (TCP 必须为已知的)。
- 在主菜单中选择 投入运行 测量 基坐标系 3 点
- 为基座标分配一个号码和一个名称。 用继续键确认
- 输入需用其 TCP 测量基坐标的工具的编号。 用继续键确认
- 用 TCP 移到新基坐标系的原点。 点击测量软键并用是键确认位置

5. 将 TCP 移至新基座正向 X 轴上的一个点。 点击测量并用是键确认位置

6. 将 TCP 移至 XY 平面上一个带有正 Y 值的点。 点击测量并用是键确认位置
7. 按下保存键
- 关闭菜单
本文作者:千纸鹤
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录
正在翻译,请稍后...