
Press Ctrl+ and K to search
目录
KRL语言简介
KRL的基本语法:变量声明、数据类型(整数、浮点数、字符串等)、常用函数、注释写法。
编程结构:了解程序结构,包括开头的初始化部分、主体部分以及结尾部分。
基础指令:PTP(点对点)、LIN(线性运动)、CIRC(圆弧运动)、WAIT(等待指令)等。
创建程序模块
编程模块应始终保存在文件夹 “Program” (程序)中
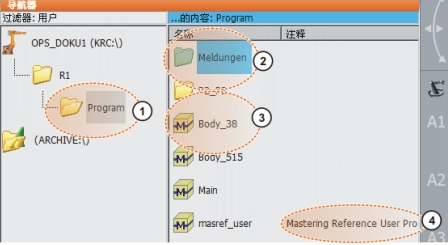
模块由两个部分组成
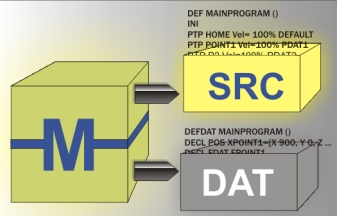
kuka#SRC文件中含有程序源代码 DEF MAINPROGRAM () INI PTP HOME Vel= 100% DEFAULT PTP POINT1 Vel=100% PDAT1 TOOL[1] BASE[2] PTP P2 Vel=100% PDAT2 TOOL[1] BASE[2] … END
kuka#DAT文件中含有固定数据和点坐标 DEFDAT MAINPROGRAM () DECL E6POS XPOINT1={X 900, Y 0, Z 800, A 0, B 0, C 0, S 6, T 27, E1 0, E2 0, E3 0, E4 0, E5 0, E6 0} DECL FDAT FPOINT1 … … ENDDAT
编写第一个简单程序
让机器人从当前位置移动到指定位置,然后返回原位。
实践中使用PTP指令进行点对点的运动编程。

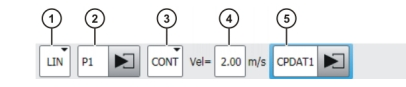
1.运动方式
- PTP 点到点 (工具沿最快轨迹运行至目标点)
- lIN 直线
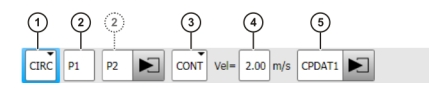
- CIRC 圆弧
- Spline 样条曲线
2.目标点 圆弧需要额外示教一个辅助点
3.cont 目标点被轨迹逼近 (有弧度转角) 空白 将精准地移动到目标点,没有弧度转角
4.速度 ptp 1-100% lin 0.001-2m/s
5.加速度 轨迹逼近距离(在3中输入cont ) 姿态引导(仅限于沿轨迹运动)
轨迹逼近距离

动作
选择当前程序的工具坐标系和基坐标系 移动机器人到目标位置
指令添加
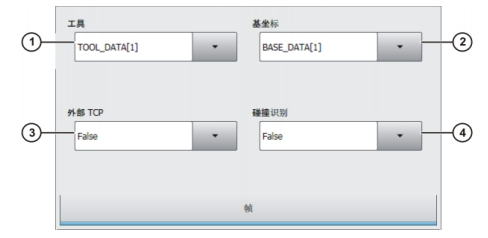
- 工具1-16
- 基坐标系1-32
- 外部TCP = false(该工具在法兰处) = true(该工具为一个固定工具)
- 碰撞识别
借助模板创建程序
- Cell: 现有的 Cell 程序,只能被替换或者在删除 Cell 程序后重新创建
- Expert: 模块由只有程序头和程序结尾的 SRC 和 DAT 文件构成
- Expert Submit: 附加的 Submit 文件 (SUB) 由程序头和程序结尾构成
- Function: SRC 函数创建,在 SRC 中只创建带有 BOOL 变量的函数头。函数结尾已经存在,但必须对返回值进行编程
- Modul: Modul (模块)由具有程序头、程序结尾以及基本框架 (INI 和 2 个 PTP HOME) 的 SRC 和 DAT 文件构成。
- Submit: 附加的 Submit 文件 (SUB) 由程序头、程序结尾以及基本框架 (DECLARATION、INI、LOOP/ENDLOOP) 构成
变量
命名规范
- 名称最多24个字符
- 名称允许包含字母 (A-Z)、数字 (0-9) 以及特殊字符 “_” 和 “$”
- 不允许为关键字
- 不允许以数字开头
- 不区分大小写
在 SCR 文件中创建的变量被称为运行时间变量
- 不能被一直显示
- 仅在声明的程序段中有效
- 在到达程序的最后一行 (END 行)时重新释放存储位置
局部 DAT 文件中的变量
- 在相关 SRC 文件的程序运行时可以一直被显示
- 在完整的 SCR 文件中可用,因此在局部的子程序中也可用
- 也可创建为全局变量
- 获得 DAT 文件中的当前值,重新调用时以所保存的值开始
系统文件 $CONFIG.DAT 中的变量
- 在所有程序中都可用 (全局)
- 即使没有程序在运行,也始终可以被显示
- 获得 $CONFIG.DAT 文件中的当前值
相关信息
需在专家用户组下进行操作
简单数据类型
- 整数 (INT)
- 实数 (REAL)
- 布尔数 (BOOL)
- 单个字符 (CHAR)
变量声明
- 在使用前必须总是先进行声明
- 每一个变量均划归一种数据类型
- 命名时要遵守命名规范
- 声明的关键词为 DECL
- 对四种简单数据类型关键词 DECL 可省略
常量
- 常量用关键词 CONST 建立
- 常量只允许在数据列表中建立
在 SCR 文件中创建变量
kukaDEF MY_PROG ( ) DECL INT counter DECL REAL price DECL BOOL error DECL CHAR symbol INI ... END
在 DAT 文件中创建变量
kukaDEFDAT MY_PROG EXTERNAL DECLARATIONS DECL INT counter DECL REAL price DECL BOOL error DECL CHAR symbol ... ENDDAT
在 $CONFIG.DAT 中创建变量
kukaDEFDAT $CONFIG BASISTECH GLOBALS AUTOEXT GLOBALS USER GLOBALS ... ;================================== ; 用户自定义类型 ;================================== ;================================== ; 外部用户自定义 ;================================== ;================================== ; 用户自定义变量 ;================================== DECL INT counter DECL REAL price DECL BOOL error DECL CHAR symbol ... ENDDAT
kuka声明与定义 DEF test1 DECL int counter #整数 DECL real price #小数 DECL bool error #布尔量 DECL char symbol #字 int counter 04 bool error 04 INI #初始化 counter 999=0 price = 998.99 error = false symbol = "x" END
本文作者:千纸鹤
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录
正在翻译,请稍后...