
Press Ctrl+ and K to search
目录
KUKA KRC4控制器架构
控制器的主要硬件组成:CPU、输入/输出模块、通信模块、驱动模块等。
控制器与机器人本体的连接方式:通过Ethernet、CAN总线等通讯协议实现信息传递。
如何通过控制面板查看机器人状态、错误信息、运行日志等。
示教器操作与界面
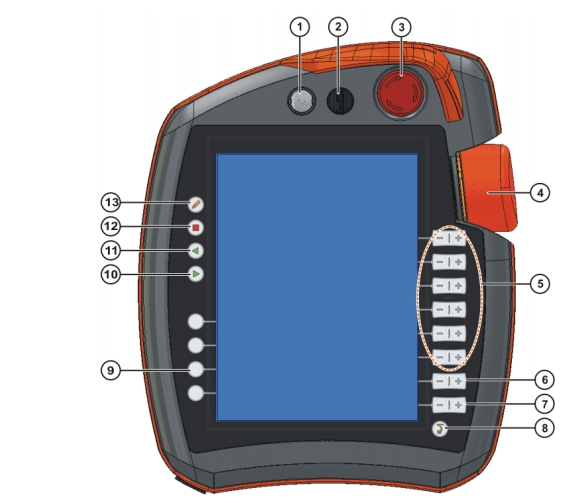
| 序号 | 说明 |
|---|---|
| 1 | 用于拔下 smartPAD 的按钮 |
| 2 | 用于调出连接管理器的钥匙开关。 只有当钥匙插入时,方可转动开关。可以通过连接管理器切换运行模式。 |
| 3 | 紧急停止键。 用于在危险情况下关停机器人。 紧急停止键在被按下时将自行闭锁。 |
| 4 | 3D 鼠标。 用于手动移动机器人 |
| 5 | 移动键。 用于手动移动机器人 |
| 6 | 用于设定程序倍率的按键 |
| 7 | 用于设定手动倍率的按键 |
| 8 | 主菜单按键。 用来在 smartHMI 上将菜单项显示出来。 |
| 9 | 工艺键。 工艺键主要用于设定工艺程序包中的参数。其确切的功能取决于所安装的工艺程序包。 |
| 10 | 启动键。 通过启动键可启动一个程序。 |
| 11 | 逆向启动键。 用逆向启动键可逆向启动一个程序。 程序将逐步运行。 |
| 12 | 停止键。 用停止键可暂停正运行中的程序。 |
| 13 | 键盘按键。 显示键盘。 通常不必特地将键盘显示出来,smartHMI 可识别需要通过键盘输入的情况并自动显示键盘。 |
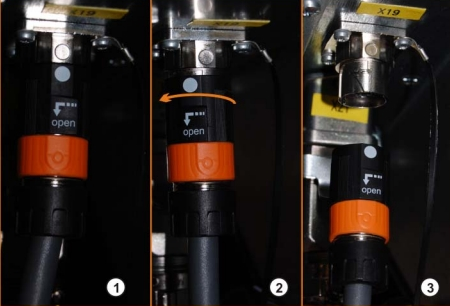
拔出 smartPAD 示教器
- 按下用来拔下 smartPAD 的按钮

2.打开控制柜
3.从机器人控制器上拔下 smartPAD
cell程序 始终在"R1"文件夹
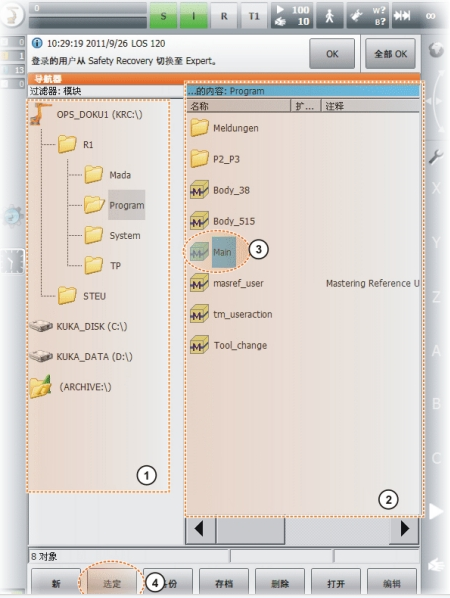

启动机器人程序的操作步骤
1.选择程序

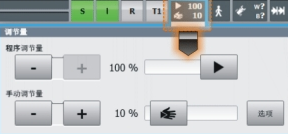
2.设定倍率
3.使能
4.启动

5. 到达目标位置后运动停止

将显示提示信息 “ 已达 BCO”
程序状态
- R 灰色:未选定程序
- R 黄色:程序指针在首行
- R 绿色:正在运行选定的程序
- R 红色:已暂停选择的程序
- R 黑色:程序指针在尾行
本文作者:千纸鹤
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录
正在翻译,请稍后...