
Press Ctrl+ and K to search
目录
控制面板与手动操作
启动与停止流程:从启动控制器到进入操作界面,如何安全停止机器人。
手动模式(JOG)操作:使用示教器手动操作机器人关节,调节运动速度与位置。
示教模式:如何将机器人移动到指定位置,并通过手动示教功能记录该位置为“教点”。
坐标系与示教点:了解如何在不同的坐标系下进行示教,使用工具坐标系与基座坐标系。
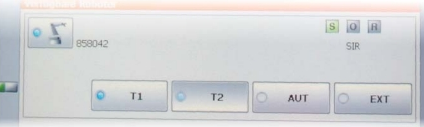
KUKA 机器人的运行方式
T1 (手动慢速运行)
- 用于测试运行、编程和示教
- 程序执行时的最大速度为 250 mm/s
- 手动运行时的最大速度为 250 mm/s
T2 (手动快速运行)
- 用于测试运行
- 程序执行时的速度等于编程设定的速度!
- 手动运行: 无法进行
AUT (自动运行)
- 用于不带上级控制系统的工业机器人
- 程序执行时的速度等于编程设定的速度!
- 手动运行: 无法进行
AUT EXT (外部自动运行)
- 用于带上级控制系统 (PLC)工业机器人
- 程序执行时的速度等于编程设定的速度!
- 手动运行: 无法进行
手动慢速运行方式 (T1)
-
在 KCP 上转动用于T1开关

-
选择运行方式
所选的运行方式会显示在 smartPAD 的状态栏中

- 单独运动机器人的各轴

4.选择轴

5.设定倍率
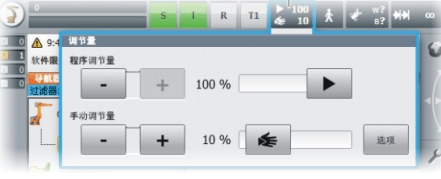
6.按下确认键(使能)
7.轴移动

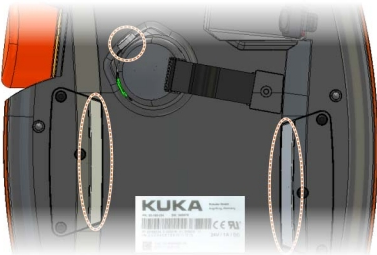
确认键
为了能绕机器人移动,必须按下一个确认开关。 smartPAD 上装有三个确认开 关。
- 未按下
- 中位
- 完全按下 (警报位置)
程序打开的两种方式
选定 打开程序后,左上角的红X为灰色,只能在上方R取消选定程序退出
打开 打开程序后,左上角的红X显示,点击红X则关闭程序
运行程序只能用选定 打开只能用于编辑
如何进入windows界面
菜单 配置 用户组 专家 KUKA
菜单 投入运行 售后服务 HMI最小化
在Windows界面修改时间
本文作者:千纸鹤
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录
正在翻译,请稍后...