
Press Ctrl+ and K to search
目录
机器人安全操作
学习机器人工作区域的安全防护要求,了解急停按钮、安全围栏等硬件设施。
机器人日常维护:定期检查机器人关节、控制器及电缆的状态,保持设备的良好运行。
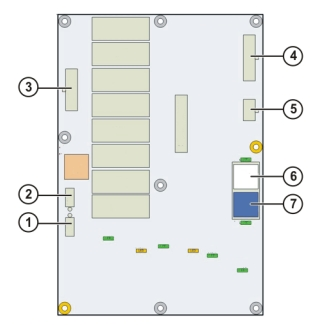
| 序号 | 插头 | 说明 |
|---|---|---|
| 1 | X250 | SIB 供电 |
| 2 | X251 | 其他组件的供电 |
| 3 | X252 | 安全输出端 |
| 4 | X253 | 安全输入端 |
| 5 | X254 | 安全输入端 |
| 6 | X259 | 库卡系统总线 |
| 7 | X258 | 库卡系统总线 |
安全回路
X253 X11
测试输出端A 4→1 5→3 14→5 15→7 16→9
测试输出端B 6→19 7→21 8→23 17→25 18→27
信道A外部紧急停止 12←2
信道B外部紧急停止 13←20
操作人员防护信道A 11←4
操作人员防护信道B 1←22
确认操作人员防护装置A 2←6
确认操作人员防护装置B 3←24
安全运行停止A 19←8
安全运行停止B 20←26
安全停止STOP2信道A 9←10
安全停止STOP2信道B 10←28
X252 X11
确认操作人员防护装置A 39←2← 常开 →4→40
确认操作人员防护装置B 57←7← 常开 →9→58
安全回路连接屏蔽
主菜单 配置 用户组 安全维护人员 KUKA
主菜单 投入运行 售后服务 投入运行模式
投入运行模式✔ 窗口栏T1上方显示IBM
注意
只能在T1和T2模式下生效
何时该标定零点?
- 更换齿轮箱后
- 大于250mm/s 速度上移动到一个终端位置
- 碰撞后
维护前一般应检查当前的零点标定
零点丢失原因
- 接地不良,电磁干扰
- roc模块损坏
- X31线(编码线)热插拔
如果机器人轴未经零点标定,则会严重限制机器人的功能:
- 不能沿程序预设点运行
- 无法在手动模式下平移
- 软件限位开关关闭
本文作者:千纸鹤
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录
正在翻译,请稍后...