
Press Ctrl+ and K to search
目录
外部自动模式配置
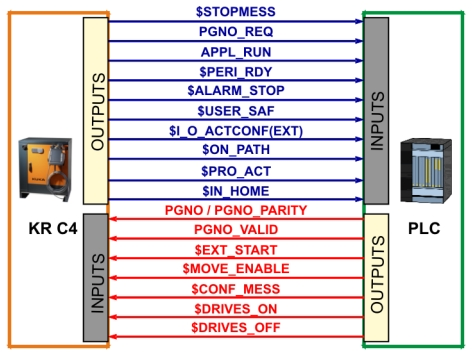
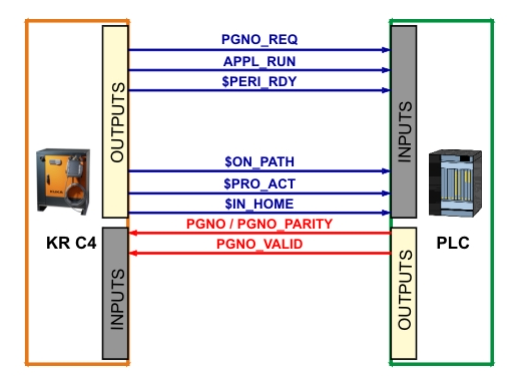
使用外部自动运行接口的输入 / 输出
PGNO_TYPE - 程序号类型
| 值 | 说明 | 示例 |
|---|---|---|
| 1 | 以二进制数值读取。上级控制系统以二进制编码整数值的形式传递程序编号。 | 0 0 1 0 0 1 1 1 => PGNO = 39 |
| 2 | 以BCD值读取。上级控制系统以二进制编码小数值的形式传递程序编号。 | 0 0 1 0 0 1 1 1 => PGNO = 27 |
| 3 | 以“N选1”的形式读取。上级控制系统或外围设备以“N选1”的编码值传递程序编号。 | 0 0 0 0 0 0 0 1 => PGNO = 1 &0 0 0 0 1 0 0 0 => PGNO = 4 |
kukaReflect_Prog #反馈回来的程序号 Pgno_Fbit #字节第一位 $IN[12] ~ $IN[19]来映射给变量Pgno 此时Pgno_Fbit的值为12 启动流程 T1模式进cell.src 运行至Ext-aut模式 PLC上电一直给$move_Enable信号 PLC给完$move_Enable信号0.5s后,一直给机器人$Drivers-off信号 PLC给完$Drivers-off信号信号0.5s后,再给机器人$Drivers-on信号 然后机器人给一个$Peri-day信号到PLC 之后PLC断开$Drivers-on信号 PLC发给机器人$Ext-star(脉冲信号)启动机器人 当PLC接收到Pgno_Req信号后,PLC把程序号发给机器人 当PLC发程序号0.5s后,PLC发机器人$Pgno_Vaild 脉冲,使程序号生效 停止机器人:断开$Drivers-off信号 启动机器人:重复345 复位故障:发脉冲信号至$conf-mess
PLC连接机器人

| KRC | 交互 | PLC |
|---|---|---|
| outputs | → | inputs |
| inputs | ← | outputs |
配置cell.src程序
配置外部输入/输出
- 在主菜单中选择配置 输入 / 输出端 外部自动运行
- 在数值栏中标定所需编辑的单元格,然后点击编辑
- 输入所需数值,并用 OK 加以保存
- 对所有待编辑的数值重复第 2 和第 3 步
- 关闭窗口。 改动即被应用
点击下方 加工 更改
kukaPgno #当前程序号 Pgno_Type #程序号类型 PGNO_LENGTH #变量映射长度 若 PGNO_TYPE 的值为 2,则只允许位宽为 4、8、12 和 16 PGNO_PARITY #奇偶校验 负值 奇 0 无分析 正值 偶 PGNO_VALID #程序编号有效 负值 下降沿 正值 上升沿 $EXT_START #外部启动 $MOVE_ENABLE #允许运行 默认#IN[1025]=true $CONF_MESS #错误确认 1026 $DRIVES_ON #驱动装置接通 $DRIVES_OFF #驱动装置关闭 $ALARM_STOP #紧急停止 1013 常闭回路 $USER_SAF #操作人员防护 1011 $PERI_RDY #驱动装置处于待机状态 1012 $STOPMESS #停止信息 1010 PGNO_REQ #程序号请求 $I_O_ACTCONF #外部自动运行激活 $PRO_ACT #程序激活 / 正在运行 1021 APPL_RUN #应用程序在运行中 $IN_HOME #机器人位于起始位置 (HOME) $ON_PATH #机器人位于轨迹上 $Pro_move #程序在没在移动 1022
输出端
- 启动条件
- 程序状态
- 机器人位置
- 运行方式
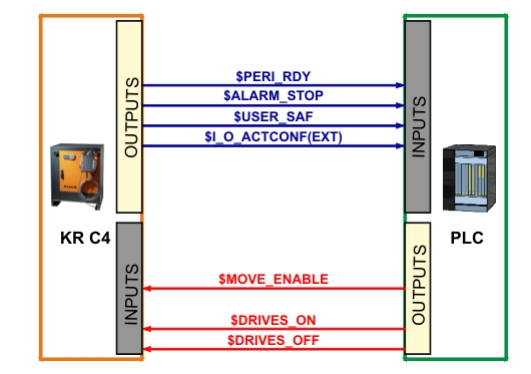
分步任务划分
- 接通驱动装置
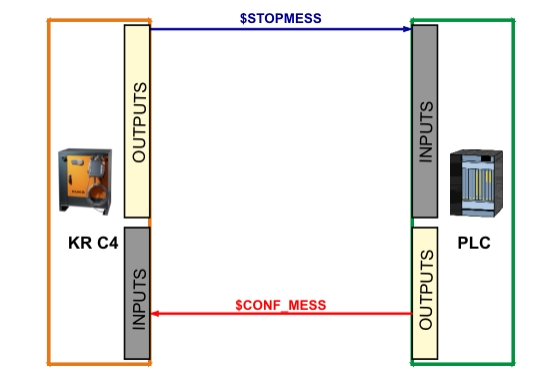
- 确认信息提示
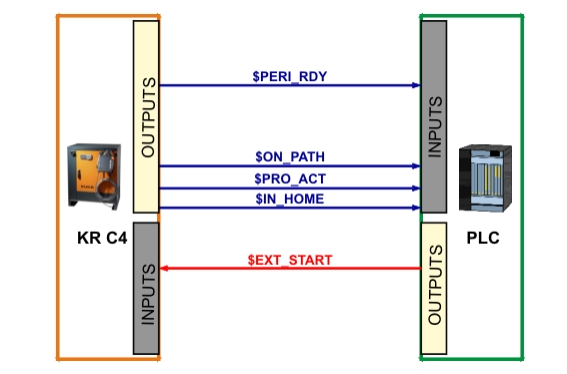
- 启动 Cell 程序
- 传递程序号并处理应用程序
对每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给PLC
kuka接通驱动装置: 前提条件 $USER_SAF - 防护门已关闭 $ALARM_STOP - 无紧急停止 $I_O_ACTCONF - 外部自动运行激活 $MOVE_ENABLE - 允许运行 $DRIVER_OFF - 未激活驱动装置关闭 接通驱动装置 $DRIVES_ON - 接通驱动装置至少 20ms 驱动装置处于待机状态 $PERI_RDY - 一有驱动装置的反馈,信号 $DRIVES_ON 便撤回 确认信息提示: 前提条件 $STOPMESS - 有停止信息 确认信息提示 $CONF_MESS - 确认信息提示 可确认的信息提示就此删除 $STOPMESS - 不再有停止信息,现在可撤回 $CONF_MESS 从外部启动程序 (CELL.SRC): 前提条件 $PERI_RDY - 驱动装置处于待机状态 $IN_HOME - 机器人位于起始位置 (HOME) 无 $STOPMESS - 无停止信息 外部启动 $EXT_START - 接通外部启动 (脉冲正沿) CELL 程序在运行 $PRO_ACT - 报告 CELL 程序在运行 $ON_PATH - 一有机器人位于轨迹上的反馈,信号 $EXT_START 便撤回 处理程序传递和应用程序: 前提条件 $PERI_RDY - 驱动装置处于待机状态 $PRO_ACT - CELL 程序在运行 $ON_PATH - 机器人在轨迹上 $IN_HOME - 机器人位于起始位置 (HOME),重新启动时不再需要 PGNO_REQ - 有程序号问询 程序号传递和确认 程序号传递 (正确的数据类型 (PGNO_TYPE),程序号长度 (PGNO_LENGTH) 和程序号的第一比特位 (PGNO_FBIT) 已设定) PGNO_VALID - 将程序号切换为有效 (确认,脉冲正沿) 应用程序在运行中 APPL_RUN - 报告应用程序在运行中 机器人离开起始位置 (HOME),应用程序结束后机器人重又返回起始位置 (HOME)
kuka$RC_rdy1 #控制器就绪 $IN_Home #home点 $T1 $T2 $AUT #自动
修改sps程序

R1 System sps程序
在USER PLC里添加
- 不允许有运动指令
- 不允许有$advance
- 不建议有时间等待
本文作者:千纸鹤
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录
正在翻译,请稍后...